
هماهنگ سازی سراسری سیستم های بی نظم ناپایدار به وسیله کنترل حالت لغزشی مجزا
چکیده
این مقاله روش کنترل حالت لغزشی مجزا را برای دسته ای از سیستم های هماهنگ سازی بی نظم متبوع-تابع (یا محرک بازخورد) ارائه می کند. روش ارائه شده تضمین کننده پایداری در سیستم حلقه-بسته بوده، و هماهنگ-سازی سراسری را برای سیستم های متبوع و تابع قابل دسترس می سازد. ساختار سیستم تابع ساده می باشد و احتیاجی به مطابقت با سیستم متبوع ندارد. علاوه بر این، در این مقاله انتخاب سطح متغیر و وجود حالت لغزشی نیز تشریح می گردد. شبیه سازی های عددی نیز به جهت تایید روش هماهنگ سازی مورد نظر ارائه شده اند.
1. مقدمه
رفتار بی نظم پدیده جالب توجهی است که در سیستم های غیرخطی رخ می دهد و در طول دهه های گذشته، توجه فزاینده ای را به خود جلب نموده است. سیستم بی نظم، سیستمی غیرخطی، پویا و به شدت پیچیده است. خصوصیت بارز سیستم بی نظم حساسیت فوق العاده به متغیرهای سیستم و شرایط آغازین می باشد، و همین امر موجب اهمیت بسیار زیاد هماهنگ سازی بی نظمی است. در سال های اخیر هماهنگ سازی بی نظمی در زمینه های گسترده ای از فیزیک و مهندسی سیستم ها به کار گرفته شده، زمینه هایی چون: واکنشات شیمیایی، مبدل نیرو، سیستم های بیولوژیک، پردازش اطلاعات، و به خصوص ارتباطات ایمن [1-3]. روش های زیادی همچون روش بازخورد موقعیت [1،2،4-10]، روش نظارت کننده [3،11-15]، و روش بازخورد خروجی [16] برای درک مسئله هماهنگ سازی سیستم های بی نظم توسعه یافته است. با این حال این روش ها در سیستم های زمان-پیوسته (غیر مجزا) توسعه یافته اند. بر اساس اصلاعات نویسنده، مسئله هماهنگ سازی سیستم های بی نظم ناپایدار در حوزه مستقل از زمان به صورت اساسی بررسی نشده و همچنان در مقاله ها به صورت دست نخورده باقی مانده، و همین امر مشوق این تحقیق می باشد.
5. جمع بندی
در این مقاله روش SMC مستقل از زمان برای هماهنگ سازی دسته ای از سیستم های بی نظم ارائه شده است. نشان داده شد که شیوه کنترل پیشنهادی تضمین کننده پایداری دینامیک خطای هماهنگ سازی است، و هماهنگ-سازی بی نظم خوبی را بین سیستم های تابع و متبوع ارائه می دهد.طراحی کنترل به نسبت ساده است و به راحتی برای هماهنگ سازی بی نظم پیاده سازی می شود. SMC مستقل از زمان به نوع متغیر قانون کنترل نیازی ندارد. پدیده تصادم و فاز دسترسی در این روش حذف می شوند. علاوه بر این، استراتژی کنترل به راحتی قابلیت کاربری در ابعاد دیگر مسائل هماهنگ سازی بی نظم را دارد. شبیه سازی های عددی تایید کننده اعتبار روش هماهنگ سازی ارائه شده هستند.
Abstract
This paper presents a discrete-time sliding mode control scheme for a class of master–slave (or drive-response) chaotic synchronization systems. The proposed scheme guarantees the stability of closed-loop system and achieves the global synchronization between the master and slave systems. The structure of slave system is simple and needs not be identical to the master system. Moreover, the selection of switching surface and the existence of sliding mode have been addressed. Numerical simulations are given to validate the proposed synchronization approach.
1. Introduction
Chaotic behavior is an interesting phenomenon appearing nonlinear systems and has been received more and more attentions in the last decades. A chaotic system is a highly complex dynamic nonlinear system. The prominent characteristic of a chaotic system is its extreme sensitivity to initial conditions and the system’s parameters, and this makes the problem of chaotic synchronization much more important. In the last few years, chaotic synchronization has applied in vast area of physics and engineering systems such as in chemical reactions, power converter, biological systems, information processing, especially in secure communication [1–3]. Many methods have been developed to realize the problem of the synchronization of chaotic systems including state feedback method [1,2,4–10], the observer method [3,11–15] and output feedback method [16]. However, these methods are developed in continuous-time system. To the best of the author’s knowledge, the problem of synchronizing uncertain chaotic systems in discrete-time domain has not been fully investigated and is still open in the literature. This has motivated our research.
5. Conclusions
In this paper, a discrete-time SMC scheme has been proposed for synchronization of a class of chaotic systems. It has been shown that the proposed control scheme ensures the stability of synchronization error dynamics, and provides good chaotic synchronization between the master and slave systems. The control design is rather straightforward and easy to implement for chaotic synchronization. The discrete-time SMC needs not a switching type of control law. Chattering phenomenon and reaching phase are eliminated. Moreover, the control strategy can be easily applied to other dimensional chaotic synchronization problems. Numerical simulation has confirmed the validity of the proposed synchronization scheme.
چکیده
1. مقدمه
2. تشریح سیستم و فرمول نویسی مسئله
3. طراحی سطح متغیر و کنترل گر حالت لغزشی مستقل از زمان
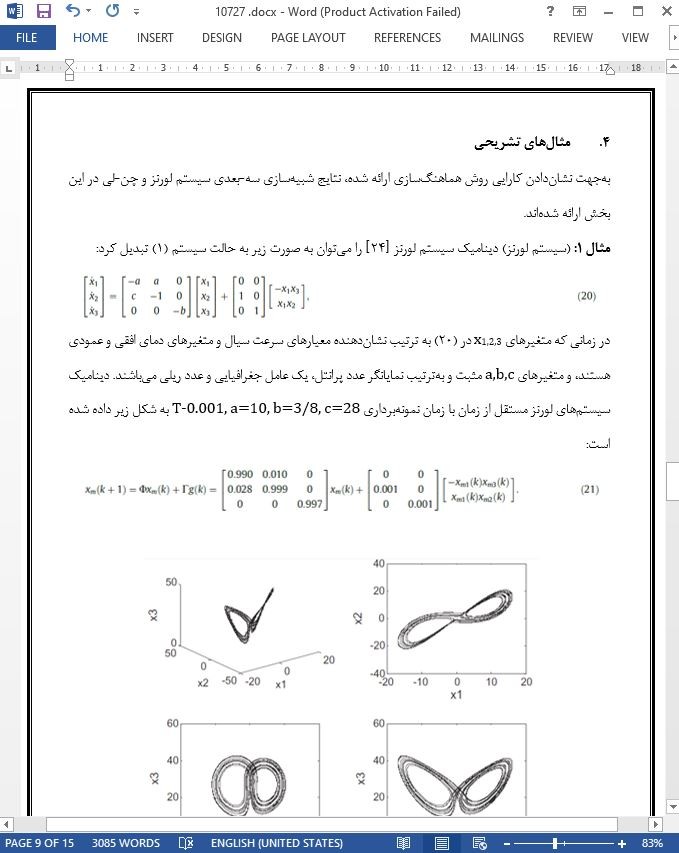
4. مثال های تشریحی
5. جمع بندی
Abstract
1. Introduction
2. System description and problem formulation
3. Switching surface and discrete-time sliding mode controller design
4. Illustrative examples
5. Conclusions
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه