کنترل کننده انطباقی چندمتغیره برای مدل MIMO غیرخطی کشتی کانتینری
چکیده
این مقاله یک سیستم کنترلی چندمتغیره انطباقی را برای فرایند دینامیک غیرخطی چندخروجی چندورودی (MIMO) ارائه می دهد. مسائل تحت مطالعه به وسیله ترکیب زاویه مسیر و سیستم کنترل سرعت پیشروی برای مدل ریاضیاتی چهار درجه آزادی غیرخطی (4-DoF) کشتی کانتینری سرعت بالای تک پیچ با مثال توضیح داده می شوند. همچنین این مطالعه پیچیدگی این مدل فرضی را بررسی و یک روش ترکیبی برای کنترل کننده کیفی انطباقی چندمتغیره ارائه می دهد. به دلیل ماهیت غیرخطی شدید معادلات حرکت کشتی، یک کنترل کننده انطباقی چندمتغیره متناسب با شرایط عملیاتی هیدرودینامیک قابل تغییر کشتی تنظیم می-شود. برای تطابق با شرایط عملکردی معین پارامترهای کنترل کننده بر پایه چهار سیگنال کمکی اندازه گیری-شده انتخاب می شوند. ترکیب سیستم به وسیله خطی سازی مدل غیرخطی کشتی در نقاط عملیاتی اسمی آن در حالت پایدار و به وسیله روش کنترل گمارش قطب انجام می شود. بخش نهایی مقاله شامل نتایج آزمون های شبیه سازی سیستم کنترل پیشنهادی انجام شده در محیط MATLAB/Simulink (Simulink: ابزار شبیه سازی) همراه با نتیجه گیری ها و نظرات نهایی می باشد.
1. مقدمه
سیستم های کنترل غیرخطی معمولا در بسیاری از حوزه های مختلف علمی و فناوری پیدا می شوند. به طورخاص، مسائل با پاسخ دشوار در کنترل حرکت و/یا موقعیت کشتی های مختلف مانند سکوهای حفاری و کشتی ها، معابر دریایی، کشتی های کانتینری و غیره بوجود می آیند. حرکات پیچیده و/یا اجسام با شکل پیچیده و متحرک در آب، و در مورد کشتی ها مرز بین آب و هوا، افزایش نیروهای مقاومتی وابسته به روش غیرخطی سرعت ها و موقعیت ها است، بنابراین باعث می شود تا اجسام شناور تبدیل به دستگاه های دینامیک غیرخطی شدید شوند.
5. نتیجه گیری
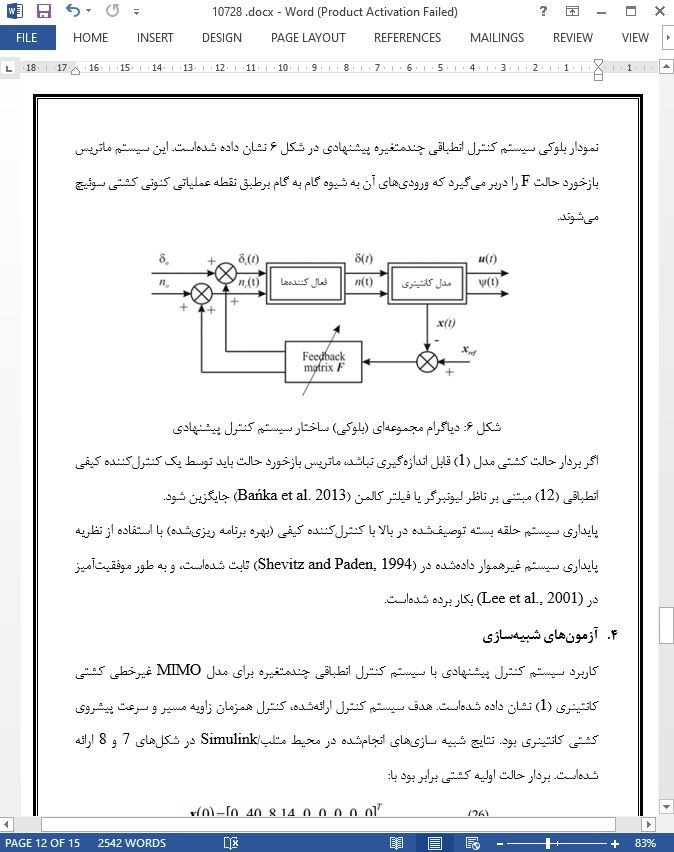
در این مقاله یک سیستم کنترل انطباقی برای دستگاه MIMO غیرخطی ارائه و بررسی شد. کنترل کننده کیفی انطباقی با زمان بندی بهره کنترل فرایند غیرخطی شدید – در این جا فرایند کشتی کانتینری – را امکان پذیر می سازد. ترکیب کنترل کننده مبتنی بر خطی سازی مدل کشتی غیرخطی در نقاط عملیاتی متناظر با مجموعه 992 ساختار عملیاتی معمول می باشد. پارامترهای کنترل کننده انطباقی به روش گام به گام بر مبنای سیگنال های کمکی اندازه گیری شده درطی عملیات کشتی تغییر می کنند. مثال ارائه شده از کنترل چندمتغیره کشتی، کارامدی این روش و اقتضاء استفاده از آن در کنترل مستقیم یا به عنوان بخشی از سیستم های کنترل بسیار پیچیده، برای مثال، حلقه مدلی در ساختار کنترل MFC (Dworak et al. 2012b) را نشان می دهد.
ABSTRACT
The paper presents an adaptive multivariable control system for a Multi‐Input, Multi‐Output (MIMO) nonlinear dynamic process. The problems under study are exemplified by a synthesis of a course angle and forward speed control system for the nonlinear four‐Degrees‐of‐Freedom (4‐DoF) mathematical model of a single‐screw, high‐speed container ship. The paper presents the complexity of the assumed model to be analyzed and a synthesis method for the multivariable adaptive modal controller. Due to a strongly nonlinear nature of the ship movements equations a multivariable adaptive controller is tuned in relation to changeable hydrodynamic operating conditions of the ship. In accordance with the given operating conditions controller parameters are chosen on the basis of four measured auxiliary signals. The system synthesis is carried out by linearization of the nonlinear model of the ship at its nominal operating points in the steady‐state and by means of a pole placement control method. The final part of the paper includes results of simulation tests of the proposed control system carried out in the MATLAB/Simulink environment along with conclusions and final remarks.
1 INTRODUCTION
Nonlinear control systems are commonly encountered in many different areas of science and technology. In particular, problems difficult to solve arise in motion and/or position control of various vessels such as drilling platforms and ships, sea ferries, container ships, etc. Complex motions and/or complex‐shaped bodies moving in the water, and in the case of ships also at the boundary between water and air, give rise to resistance forces dependent in a nonlinear way on velocities and positions, thus causing the floating bodies to become strongly nonlinear dynamic plants.
5 CONCLUSIONS
In the paper an adaptive control system for the nonlinear MIMO plant was proposed and tested. The utilized adaptive gain scheduling modal controller allows one to control a strongly nonlinear process, here the model of a container vessel. The synthesis of the controller is based on the linearization of a nonlinear ship model in operating points corresponding to the set of 992 typical operating regimes. The adaptive controller parameters vary in a stepwise way on the basis of auxiliary signals measured during ship operation. The presented example of multivariable control of the ship, shows efficiency of this method and the appropriateness of its use to the direct control or as a part of more complex control systems, e.g. a model loop in the MFC control structure (Dworak et al. 2012b).
چکیده
1. مقدمه
2. مدل غیرخطی کشتی کانتینری
2 – 1: پویایی کشتی
2 – 2: پویایی فعال کننده ها
3. سیستم کنترل انطباقی چندمتغیره
4. آزمون های شبیه سازی
5. نتیجه گیری
ABSTRACT
1 INTRODUCTION
2 NONLINEAR MODEL OF A CONTAINER SHIP
2.1 Ship dynamics
2.2 Actuators dynamics
3 MULTIVARIABLE ADAPTIVE CONTROL SYSTEM
4 SIMULATION TESTS
5 CONCLUSIONS
- اصل مقاله انگلیسی با فرمت ورد (word) با قابلیت ویرایش
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه