
به حداقل رساندن اتلاف گذرا در راه اندازی ماشین القایی
چکیده
مینیمم کردن اتلاف در طول گذار کاری در کاربردهای ماشین های القایی نادیده گرفته می شود. با این حال مینیمم کردن اتلاف، می تواند تا حد زیادی باعث بهبود بهره وریِ تغییر سرعت گشتاور نیرو یا پروفایل های سرعت مرجع شود. تئوری کنترل بهینه قبلا به طور موفقیت آمیزی برای توسعه قوانین کنترل اعمال شد که اتلافات را در طول گذار به حداقل رساند. تمام کارهای قبلی بر مبنای مدل ماشین های القایی میدان گرا بوده است. اگرچه در این مقاله یک مساله کنترل بهینه بر مبنای مدل ماشین القایی غیر میدان گرا بسط داده شده و شبیه سازی شده است. علاوه بر این یک کار تابع هزینه به صورت جامع توسعه پیدا کرد و استفاده شد به طوریکه بتواندحالت کاری پایدار ماشین را تضمین کند. تاریخچههای بهینهی کنترل آفلاین با استفاده از روش گرادیان مزدوج ایجاد شد. عملکرد قانون کنترل ارائه شده از طریق شبیه سازی تایید شده است و نتایج با نتایج حاصل از کنترل گر میدان گرای مستقیم مقایسه شده است.
1- مقدمه
حضور همیشگی ماشین های القایی (IM) در صنعت به حجم عظیمی از تحقیقات به منظور بهبود بازدهی آن ها در نقاط کاری متفاوت، منجر شده است. اگرچه با بررسی مقالات نوشته شده در این موضوع، اکثریت کارها روی مینیمم کردن اتلاف حالت پایدار ، متمرکز بوده است. رایج ترین روش ها برای مینیمم کردن اتلاف IM بهینه سازی شار (جریان) روتور در طول حالت پایدار است. اما در طول گذارهای نقاط عملیاتی (تغییر در سرعت مرجع یا گشتاور چرخشی نیرو) الگوریتم مینیمم کردن اتلاف، از بین می رود و جریان در سطح ارزیابی شده نگه داشته می شود، بنابراین یک عملکرد دینامیکی سریع تر حاصل می شود.
6- نتیجه گیری
تئوری کنترل بهینه هم برای مدل های FO و هم برای مدل های non-FO از یک IM به منظور تعیین شرایط لازم برای سوابق کنترلی که اتلاف توان گذار را مینیمم خواهد کرد و یک عملکرد دینامیک قابل قبول دارد، اعمال شده است. روش گرادیان مزدوج برای به دست آوردن راه حل های عددی قانون کنترل استفاده شده بود که شرایط لازم را برآورده می کند. نتایج شبیه سازی که عملکرد OC را با IFOC مقایسه می کند، ارئه شد. نشان داده شد که کاهش قابل توجه اتلاف انرژی در طول دوره گذار بدون از بین رفتن عملکرد دینامیک ممکن بود. بنابراین نشان داده شد که OC مبتنی بر مدل های non-FO می تواند در مقایسه با روش های OC موجود که منحصرا از مدل-های FO استفاده می کنند ، نتایج معادلی را بدهند. کار این مقاله با انجام آزمایش های سخت افزاری، قابل گسترش است.
Abstract
Loss minimization during transient operation is an often neglected in most induction machine applications. However, loss minimization can greatly improve efficiency in case of fast changing load torques or reference speed profiles. Optimal control theory has been successfully applied previously to develop control laws that minimize losses during transients. All previous works were based on the field oriented induction machine model. In this paper, however, an optimal control problem based on the non-field oriented induction machine model is developed and simulated. Additionally, a more comprehensive cost functional is developed and utilized that would guarantee a stable steady state operation of the machine. Offline optimal control histories are generated using the conjugate gradient method. The performance of the proposed control law is verified through simulation and the results are compared with those from an indirect field oriented controller.
I. INTRODUCTION
THE ubiquity of induction machines (IM) in industry has led to a large volume of research into improving their efficiency at various operating points. However, it becomes clear from the literature surveys on this topic that a majority of the work has focused on steady state loss minimization [1]. The most common approach to IM loss minimization is to optimize the rotor flux during steady state. But during operating point transitions (change in reference speed or load torque) the loss minimization algorithm is disabled and the flux is maintained at rated level so as to get a faster dynamic performance.
VII. CONCLUSION
Optimal control theory was applied to both non-FO and FO models of an IM to determine the necessary conditions for a control history that would minimize transient power losses and have an acceptable dynamic performance. Conjugate gradient method was used to obtain numerical solutions of the control law that satisfy the necessary conditions. Simulation results were presented that compared the performance of OC with that of IFOC. It was shown that a significant reduction of energy losses was possible during the transient period without undue sacrifice of the dynamic performance. Furthermore, it was show that OC based on non-FO models can give equivalent results compared to the existing OC approaches that exclusively use FO models. The work in this paper can be further extended by performing hardware experiments.
(جهت بزرگ نمایی روی عکس کلیک نمایید)
چکیده
1- مقدمه
2- اصل مینیمم سازی Pontryagin
الف) مدل IM جریانی غیر میدان گرا
ب) مدل IM مبتنی بر جریان میدان گرا (FO)
3- قانون کنترل بهینه با استفاده از PMP
الف) OC با مدل IM غیر میدان گرا (non-FO)
ب) OC با مدل IM میدان گرا (FO)
4 حل عددی
5. نتایج و تجزیه و تحلیل
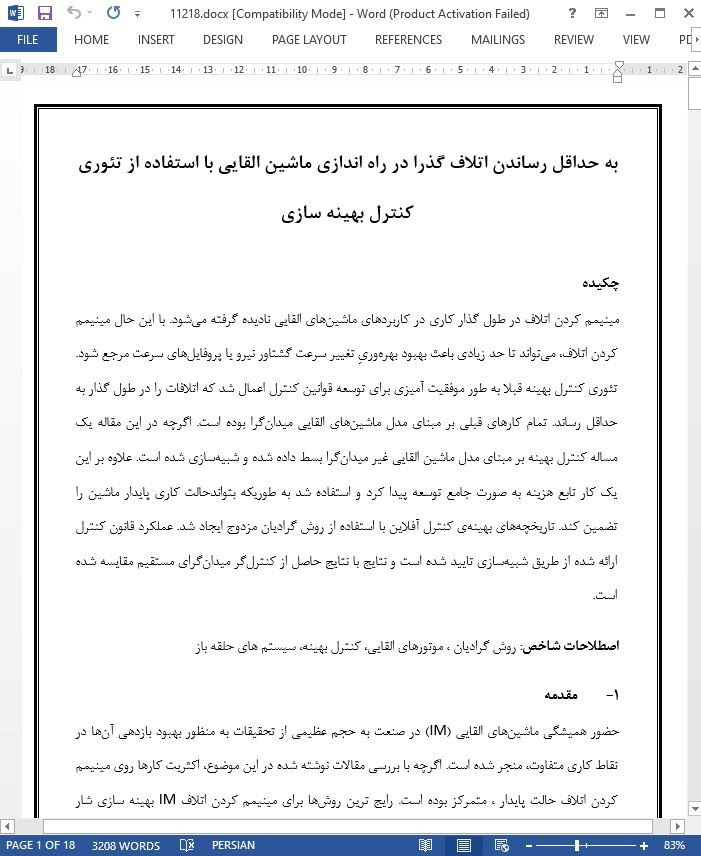
الف) مقایسه گشتاور و سرعت
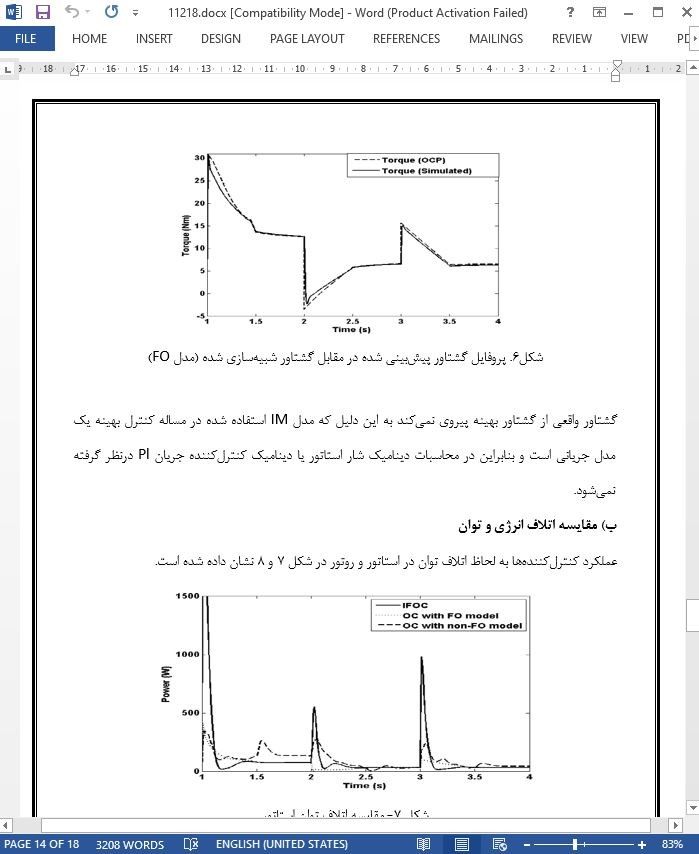
ب) مقایسه اتلاف انرژی و توان
ج) مشاهدات
د) امکان سنجی یک قانون کنترل حلقه باز
6- نتیجه گیری
Abstract
I. INTRODUCTION
II. PONTRYAGIN’S MINIMUM PRINCIPLE
III. CURRENT FED IM MODEL
A. Non-FO Current fed IM model
B. FO Current fed IM model
IV. OPTIMAL CONTROL LAW USING PMP
A. OC with non-FO IM model
B. OC with FO IM model
V. NUMERICAL SOLUTION
VI. RESULTS AND ANALYSIS
A. Comparing Torque and Speed
B. Comparing Power and Energy Losses
C. Observations
D. Feasibility of an open loop control law
VII. CONCLUSION
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه