
استفاده از روش برآورد کرنل تاری تقویت شده برای تصاویر پلاک وسایل نقلیه سریع
چکیده
پلاک به عنوان شناسه منحصر به فرد یک وسیله نقلیه، مدرکی کلیدی برای کشف وسایل نقلیه پرسرعت یا آنهایی که پس از تصادف فرار میکنند، به شمار میآید. با این حال تصویر کلی که دوربینهای مدار بسته از وسایل نقلیه پرسرعت میگیرند اغلب به دلیل سرعت زیاد آنها تار بوده و برای انسان غیرقابل تشخیص میگردد. این تصاویر گرفته شده از پلاک خودروها معمولاً دارای روزلوشن پایینی بوده و از اتلاف شدید اطلاعات لبهها رنج میبرند که چالش عمدهای را فراروی روشهای از بین بردن تاری تصاویر ناخوانای موجود قرار میدهد. برای تصویر پلاک اتومبیل، تارشدگی ناشی از حرکت سریع آن، شالوده و هسته اساسی تارشدگی را میتوان به عنوان پیچیدگی یکنواخت خطی موردنظر قرار داده و آن را به صورت پارامتری با زاویه و طول مدلسازی نمود. در این مقاله برای شناسایی هسته اصلی (کرنل) تارشدگی، الگوی مبتنی بر نمایش تنک جدیدی را ارائه مینماییم. با تحلیل ضرایب نمایش تنک تصویر بازیابی شده، براساس مشاهداتی که در آنها تصویر بازیابی شده دارای تنکترین نمایش ممکن در هنگامی است که زاویه کرنل با زاویه حرکت واقعی متناظر میباشد، زاویه کرنل را تعیین مینماییم. سپس طول حرکت کرنل را با تبدیل فوریه رادون برآورد مینماییم. حتی در زمانهایی که پلاک خودرو برای انسان غیرقابل تشخیص است این الگو میتواند تارشدگی عمده حرکت را به خوبی اصلاح نماید. با استفاده از تصاویر دنیای واقعی، روش خود را ارزیابی نموده و آن را با چند الگوریتم جدید رفع تاری تصاویر ناخوانا مقایسه نمودهایم. نتایج تجربی حاکی از برتری روش پیشنهادی ما از لحاظ اثربخشی و توانمندی میباشند.
1. مقدمه
پلاک خودرو شناسه منحصر به فرد هر وسیله نقلیه بوده و نقش مهمی در شناسایی وسایل نقلیه حادثهساز ایفا مینمایند. امروزه سیستمهای مختلفی برای شناسایی و ردیابی وسایل نقلیه پرسرعت متخلف در جادههای اصلی شهرها و بزرگراهها وجود دارد. با این وجود نحوه حرکت وسایل نقلیه در زمان قرار گرفتن در مقابل این سیستمها به گونهای است که باعث تارشدگی تصاویر لحظهای گرفته شده از آنها میگردد. بنابراین زمان نوردهی (سرعت شاتر) تاثیر بسزایی در مقدار این تارشدگی دارد. برای گرفتن تصاویر ویدئویی، زمان پرتودهی به میزان عمدهای به شرایط نوردهی و روشنسازی وابسته میباشد. در شرایط معمول بیرون با داشتن نور آفتاب، این زمان معمولاً در حدود 300/1 ثانیه است. برای وسایل نقلیه متحرک با سرعت 60 مایل در ساعت، جابجایی پلاک آن در زمان پرتودهی در حدود 9 سانتیمتر است که با خود اندازه پلاک قابل مقایسه میباشد (اندازه این پلاکها در کشور چین در حدود 44 × 14 سانتیمتر میباشد) یعنی زمانی که اندازه تصویر پلاک 440 × 140 پیکسل است طول کرنل برابر 45 پیکسل میباشد و زاویه بین صفحه عکسبرداری دوربین و صفحه افقی در حدود 60 درجه میباشد.
5. نتیجهگیری
در این مقاله، الگوریتم برآورد پارامتر کرنل جدیدی را برای پلاک مربوط به وسایل نقلیه پرسرعت ارائه نمودهایم. با در نظر گرفتن برخی فرضیات بسیار ضعیف، مسئله تاریزدایی پلاک خودرو را میتوان به یک مسئله برآورد پارامتری کاهش داد. ویژگی شبهمحدب جالب توجه ضرایب نمایش تنک با پارامتر کرنل (زاویه) کشف و مورد بررسی قرار گرفته است. این ویژگی به گونهای موثر، ما را به سمت طراحی الگوریتمی درست به ریز جهت برآورد زاویه رهنمون میسازد. با بررسی ماهیت طیف توانی مورد استفاده تصویر طبیعی، فرایند برآورد طول کامل شده است.
Abstract
As the unique identification of a vehicle, license plate is a key clue to uncover over-speed vehicles or the ones involved in hit-and-run accidents. However, the snapshot of over-speed vehicle captured by surveillance camera is frequently blurred due to fast motion, which is even unrecognizable by human. Those observed plate images are usually in low resolution and suffer severe loss of edge information, which cast great challenge to existing blind deblurring methods. For license plate image blurring caused by fast motion, the blur kernel can be viewed as linear uniform convolution and parametrically modeled with angle and length. In this paper, we propose a novel scheme based on sparse representation to identify the blur kernel. By analysing the sparse representation coefficients of the recovered image, we determine the angle of the kernel based on the observation that the recovered image has the most sparse representation when the kernel angle corresponds to the genuine motion angle. Then, we estimate the length of the motion kernel with Radon transform in Fourier domain. Our scheme can well handle large motion blur even when the license plate is unrecognizable by human. We evaluate our approach on real-world images and compare with several popular state-of-the-art blind image deblurring algorithms. Experimental results demonstrate the superiority of our proposed approach in terms of effectiveness and robustness.
I. INTRODUCTION
License plate is the unique ID of each vehicle and plays a significant role in identifying the trouble-maker vehicle. Nowadays, there are lots of auto over-speed detection and capture systems for traffic violation on the main roads of cities and high-ways. However, the motion of vehicle during the exposure time would cause the blur of snapshot image. Therefore, the exposure time (shutter speed) has significant impact on the amount of blur. For video shooting, the exposure time is largely dependent on the illumination situations. In usual outdoor scene with sunshine, the typical exposure time is about 1/300 second. For a vehicle running at 60 miles per hour, during the exposure time, the displacement of license plate is about 9 centimeters which is comparable with the size of the license plate (14 × 44 centimeters in China), i.e., the length of kernel is about 45 pixels when the license plate image is with size of 140×440 pixels and the angle between camera imaging plane and horizontal plane is about 60 degree.
V. CONCLUSION
In this paper, we propose a novel kernel parameter estimation algorithm for license plate from fast-moving vehicles. Under some very weak assumptions, the license plate deblurring problem can be reduced to a parameter estimation problem. An interesting quasi-convex property of sparse representation coefficients with kernel parameter (angle) is uncovered and exploited. This property leads us to design a coarse-to-fine algorithm to estimate the angle efficiently. The length estimation is completed by exploring the well-used power-spectrum character of natural image.

(جهت بزرگ نمایی روی عکس کلیک نمایید)
چکیده
1. مقدمه
2. پژوهشهای مرتبط انجام شده
الف. روشهای MAP
ب. روشهای حاشیهسازی
ج. روشهای پارامتری ارزیابی کرنل
3. ارزیابی کرنل تاری
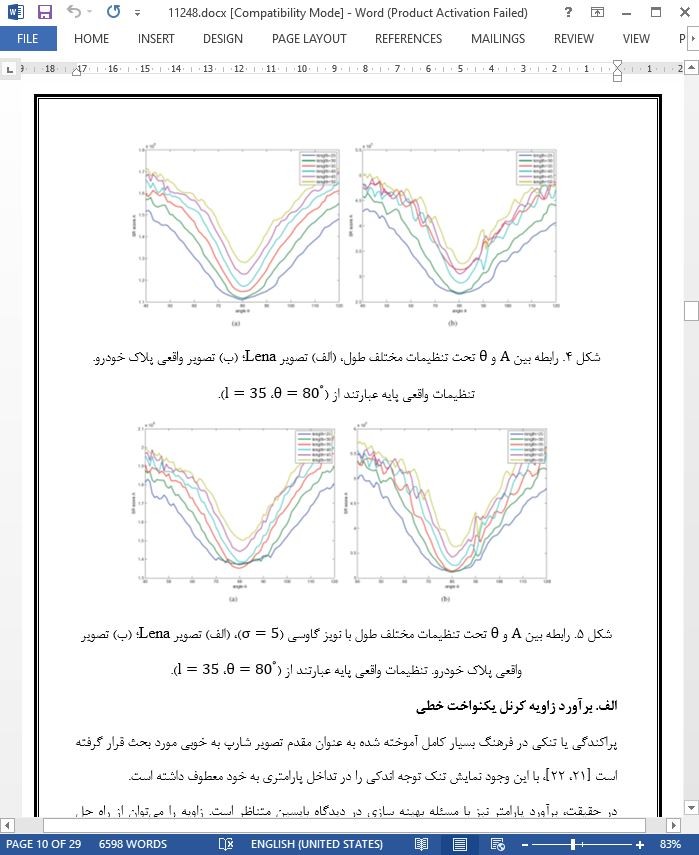
الف. برآورد زاویه کرنل یکنواخت خطی
ب. برآورد طول کرنل یکنواخت خطی
ج. چکیدهای از الگوی ارائه شده
4. نتایج تجربی و بحث
الف. دادههای تجربی
ب. اجرای الگوی پیشنهادی
ج. ارزیابی الگوریتم پیشنهادی
د. بحث
5. نتیجهگیری
Abstract
I. INTRODUCTION
II. RELATED WORK
A. MAP methods
B. Marginalization methods
C. Parametric kernel estimation methods
III. ESTIMATION OF BLUR KERNEL
A. Angle estimation of linear uniform kernel
B. Length estimation of linear uniform kernel
C. Summary of proposed scheme
IV. EXPERIMENTAL RESULTS AND DISCUSSION
A. Experimental data
B. Implementation of our scheme
C. Evaluation of the proposed algorithm
D. Discussion
V. CONCLUSION
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه