
پوست الکترونیکی الاستومری برای حس لامسه مصنوعی
در این گزارش، پوست الکترونیکی الاستومری پوشیدنی ارائه شده است که از سنسورهای مقاومتی برای نظارت بر مفصلبندی انگشتان و سنسورهای خازنی فشار لمسی برای ثبت فشار توزیعی در امتداد کل طول انگشتان تشکیل شده است. حساسیت فشار برای فشارهای در محدوده 5 تا kPa 405، از مرتبه 001/0 تا kPa-1 01/0 است که بیشتر طیف حس فیزیولوژیکی انسان را در بر میگیرد. این حساسیت به فشار از طریق فوم سیلیکونی نرم و تراکمپذیری همچون فیلمهای فلزی نازک دیالکتریک و کششپذیری قابل حصول میباشد. مجتمعسازی این سنسورها در یک دستکش پارچهای، امکان تفکیک کرنش و حساسیت متقابل فشار سنسورهای لمسی را میسر ساخته و امکان تحلیل دقیق فرایند گرفتن یک جسم را میسر میسازد. ساخت دستکش سنسوردار در یک سیستم خودکار (human-in-the-loop) برای کنترل فرایند گرفتن اجسام در دست، گامی مهم به سمت ساخت دست مصنوعی با قابلیتهای حسی مجتمع به شمار میآید.
1. مقدمه
افراد برای حفظ تعادل طبیعی و انجام فعالیتهای اساسی زندگی روزمره خود به ورودیهای حسی و پوستی نیاز دارند [1]. روشهای مختلفی برای کمک به فرایند درک و در نتیجه بازسازی و بازگرداندن حس لامسه برای قسمتهای مختلف ادراک لمسی انسان [2]، دستکاری رباتیک [3]، کنترل عضو مصنوعی [4]، پیری [5]، معالجات توانبخشی بالینی پس از آسیبهای تروما [6] و بیماریهای عصبی [7] موردنیاز میباشد. از آنجایی که حس لامسه در کل بدن گسترش مییابد بنابراین از دیگر حسهای موجود متمایز است. حس لامسه، اطلاعات حسی دریافتی از پوست، مفاصل، تاندونها و عضلات را با هم ادغام مینماید. گیرندههای عضلانی در هنگام در دست گرفتن اجسام، جهت دست و انگشتان و گیرندههای مکانیکی، سختی و بافت آنها را گزارش مینمایند. علاوه بر این گیرندههای گرمایی، تغییرات مطلق و نسبی دما جسم گرفته شده را رمزگذاری نموده و گیرندههای درد، در مقابل محرکها و واکنشهای آسیبرسان، علائم هشداری تولید مینمایند.
4. بخش تجربی
آمادهسازی و مشخصهیابی الاستومر: PDMS (Sylgard 184، Dow Corning) براساس فرایند پیشنهادی سازنده و با ترکیب عامل بازی و سختکننده با نسبتهای وزنی 10:1 آمادهسازی شده است. EcoFlex 00-10 دوجزئی (Smooth-On) با نسبت وزنی 1:1 مخلوط شده است. غشاهای سیلیکونی با ضخامت زیر میلیمتر با فرایند پوشش دورانی (spin-coating) تحت عمل لایه خودچسبنده سیلان (trichloro(1H ,1H ,2H ,2H-perfl uorooctyl)silane، Sigma–Aldrich)، بر روی ویفرهای سیلیکونی آماده شدهاند. پس از 2 ساعت سختگردانی و عملآوری در دمای °C 80، غشاها از ویفرها کنده شده و به اندازههای دلخواه برای آزمایش بریده شدهاند. پلیاورتان (Poron 4701-30-25031-04، Rogers Corporation) و غشاهای فوم سیلیکون (Bisco HT800،Rogers Corporation) مورد استفاده قرار گرفتهاند.
This report demonstrates a wearable elastomer-based electronic skin including resistive sensors for monitoring fi nger articulation and capacitive tactile pressure sensors that register distributed pressure along the entire length of the fi nger. Pressure sensitivity in the order of 0.001 to 0.01 kPa −1 for pressures from 5 to 405 kPa, which includes much of the range of human physiological sensing, is achieved by implementing soft, compressible silicone foam as the dielectric and stretchable thin-metal fi lms. Integrating these sensors in a textile glove allows the decoupling of the strain and pressure cross-sensitivity of the tactile sensors, enabling precise grasp analysis. The sensorized glove is implemented in a human-in-the-loop system for controlling the grasp of objects, a critical step toward hand prosthesis with integrated sensing capabilities.
1. Introduction
Individuals rely on proprioceptive and cutaneous inputs to maintain normal stance and accomplish fundamental activities of daily life. [ 1 ] Strategies to help understand and then reconstruct and restore the sense of touch are needed for areas as diverse as human haptic perception, [ 2 ] robotic manipulation, [ 3 ] control of a prosthetic limb, [ 4 ] aging, [ 5 ] clinical rehabilitation therapies following traumatic injuries, [ 6 ] and neurodegenerative diseases. [ 7 ] Touch differs from the other senses in that it spreads over the entire body. Tactile perception integrates sensory information from the skin, joints, tendons, and muscles. When grasping objects, proprioceptors report on the orientation of the hand and fi ngers while skin mechanoreceptors sense hardness and texture of the objects. In addition, skin thermoreceptors encode absolute and relative change in temperature of handled objects, and nociceptors provide alerts on harmful stimuli and interactions.
4. Experimental Section
Elastomer Preparation and Characterization : PDMS (Sylgard 184, Dow Corning) was prepared according to manufacturer suggested process by mixing the base and curing agent at a 10:1 weight ratio. Two-part Ecofl ex 00-10 (Smooth-On) was mixed at a 1:1 A:B weight ratio. Sub-millimeter thick silicone membranes were prepared by spin-coating on silicon wafers treated with a silane anti-adhesion layer (trichloro(1 H ,1 H ,2 H ,2 H - perfl uorooctyl)silane, Sigma–Aldrich). After 2 h curing at 80 °C, the membranes were then peeled from the wafers and cut to size for testing. The polyurethane (Poron 4701-30-25031-04, Rogers Corporation) and the silicone (Bisco HT800, Rogers Corporation) foam membranes were used as provided. Compression tests were performed with an Electromechanical Universal Test System (UTS) (C42.503, MTS Systems).

(جهت بزرگ نمایی روی عکس کلیک نمایید)
1. مقدمه
2. نتایج
2. 1. مشخصهیابی مکانیکی مواد الاستومری
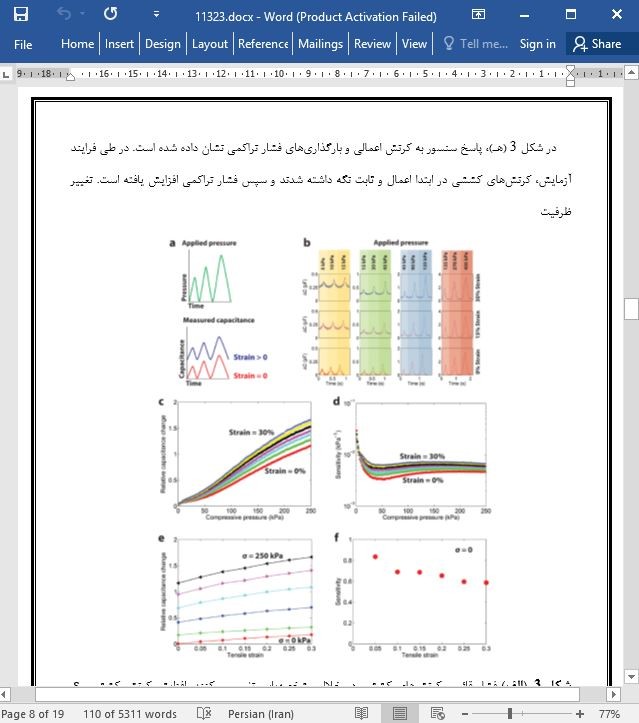
2. 2. پاسخ الکترومکانیکی یک سنسور مبتنی بر فوم سیلیکونی
2. 3. ادغام سنسورهای نرم فشار و کرنش در پوست الکترونیکی قابل پوشش (پوشیدنی)
2. 4. سنجش عملکردی: تمایز سفتی جسم و تنظیم فرایند چنگزنی
3. نتیجهگیری
4. بخش تجربی
1. Introduction
2. Results
2.1. Mechanical Characterization of Elastomeric Materials
2.2. Electromechanical Response of a Silicone Foam-Based Sensor
2.3. Integration of Soft Pressure and Strain Sensors in a Wearable Electronic Skin
2.4. Functional Sensing: Object Stiffness Discrimination and Grasping Adjustment
3. Conclusion
4. Experimental Section
- اصل مقاله انگلیسی با فرمت ورد (word) با قابلیت ویرایش
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه