
پهباد زیرآبی حاوی دوربین پانورامیک جهت شناسایی خودکار ماهی براساس یادگیری عمیق
چکیده
پیشرفت بالای فنآوری پهباد سبب استفاده از پهبادها در گسترهی متنوعی از حوزهها شده است. همچنین، از این پهبادها عمدتا بهعنوان وسیلهی حملونقل هوایی بدون سرنشین استفاده میشود. ما اعتقاد داریم که پهبادهای زیرآبی به یک موضوع تحقیقاتی مهم در آیندهی نزدیک تبدیل خواهند شد و یک بازار در این زمینه ایجاد میگردد. ما یک پهباد زیرآبی با دوربین پانورامیک 360 درجه که بهعنوان چشم پهباد عمل میکند را توسعه دادیم. طراحی براساس سختافزار متن- باز انجام گرفته است که این طراحی بهعنوان یک متن- باز برای مشارکت جهت تولید نوآوری از جمله در پهباد به اشتراک گذاشته خواهد شد. کارکرد دوربین پانورامیک 360 درجه از طریق اصلاح کردن تصاویر گرفته شده بهوسیلهی دو عدسی چشم ماهی ایجاد شده است. پهباد زیرآبی بهوسیلهی گسترش دادن ماژول محاسباتی Raspberry Pi طراحی شده است، چارچوب آن نیز بهوسیلهی OpenSCAD طراحی گردیده است و صفحهی مدار چاپی نیز با استفاده از MakePro طراحی شده است. ما جهت بررسی عمکلرد پهباد زیرآبی، بر روی تشخیص ماهی متمرکز شدهایم تا گونههای ماهی را در یک دریاچهی طبیعی جهت کمک به محافظت محیطزیست اصیل بررسی نماییم. شناسایی ماهی براساس یادگیری عمیق انجام شده است که امروزه یک موضوع بسیار مهم در زمینهی نحقیق هوش مصنوعی بهشمار میآید. نتایج آزمایشگاهی نشان میدهد که عمکلرد پهباد زیرآبی بهصورت خودکار در غواصی در داخل دریاچه بهدست میآید. تصاویر پانورامیک 360 درجه بهصورت درست تولید شده است. شناسایی ماهی بهوسیلهی یادگیری عمیق، 87% دقت بهدست میآورد.
5- نتیجهگیری
این پژوهش یک پهباد زیرآبی را ارائه داده است که مجهز به عدسیهای چشم ماهی و کارکرد یک دوربین پانورامیک 360 درجه برای ایجاد کردن تصاویر پانورامیک با استفاده از یک الگوریتم تولید کردن تصویر بوده است. تولید کردن تصویر پانورامیک 360 درجه و پهباد زیرآبی با استفاده از سختافزار متنباز توسعه داده شده است؛ ماژولهای محاسباتی بر روی یک ماژول محاسباتی Raspberry Pi گسترش داده شده است. ما یک پهباد زیرآبی خودکار را پیادهسازی کردهایم و نتایج را در یک دریاچه بهدست آوردهایم. تصاویر پانورامیک 360 بهصورت صحیح تولید شدهاند. نتایج آزمایشگاهی نشان میدهد که تقریبا همهی گونههای ماهی با نرخ تشخیص بیش از 85% با استفاده از AlexNet و GoogLeNet (در AlexNet، 87% تشخیص بهدست آمده است) تشخیص داده شدهاند. زمان تشخیص برای 115 تصویر، 6 ثانیه طول کشیده است. پس ممکن است AlexNet به دلیل دقت بالا برای کاربرد در زمان واقعی استفاده گردد. ما در آینده قصد داریم جهت بهبود پهباد زیرآبی، از آن در سطح عملی استفاده کنیم.
Abstract
Highly developed drone technology enables the use of drones in a wide variety of areas. However, those drones are mainly used in the unmanned aerial vehicles. We believe that underwater drones will become a big research topic and find a market in the near future. We developed an underwater drone with a 360° panoramic camera acting as the “eye”of the drone. The designs are based on the open-source hardware and will be shared as an open-source for contributing to the innovation of manufacturing including drone. The function of the 360° panoramic camera is generated by correcting the images taken by two fisheye lenses. The underwater drone was designed by extending the Raspberry Pi compute module, the frame was designed by OpenSCAD, and the printed circuit board was designed by MakePro. As for the application of the underwater drone, we focused on fish recognition for investigating fish species in a natural lake to help protect the original environment. Fish recognition is based on deep learning, which is the biggest topic in the artificial intelligence research field today. Experimental results show that the function of the underwater drone achieved at diving in the leak automatically. The 360° panoramic images were generated correctly. Fish recognition achieved 87% accuracy by deep learning.
V. CONCLUSION
This paper presented an underwater drone equipped with fisheye lenses and with the function of a 360-degree panoramic camera for taking panoramic images by using an image generation algorithm. The 360-degree panoramic image generation and the underwater drone were developed with open-source software; the compute modules were extended on a Raspberry Pi compute module. We implemented an automatic underwater drone and conducted experiments in a lake. The 360-degree panoramic images were generated correctly. The experimental results showed that almost all fish species were recognized with a recognition rate higher than 85% with AlexNet and GoogLeNet (AlexNet achieved 87%). The recognition time for 115 images was 6 seconds. Hence, AlexNet may be used in a real-time application with high accuracy. In the future, we aim to improve the underwater drone to a practical level.
(جهت بزرگ نمایی روی عکس کلیک نمایید)
چکیده
1- مقدمه
2- طراحی پهباد زیرآبی
الف) ماژول محاسباتی اصلی و گسترش دادن آن
ب) طراحی چارچوب
ج) تولید تصویر پانورامیک 360 درجه
3- شناسایی خودکار ماهی براساس یادگیری عمیق
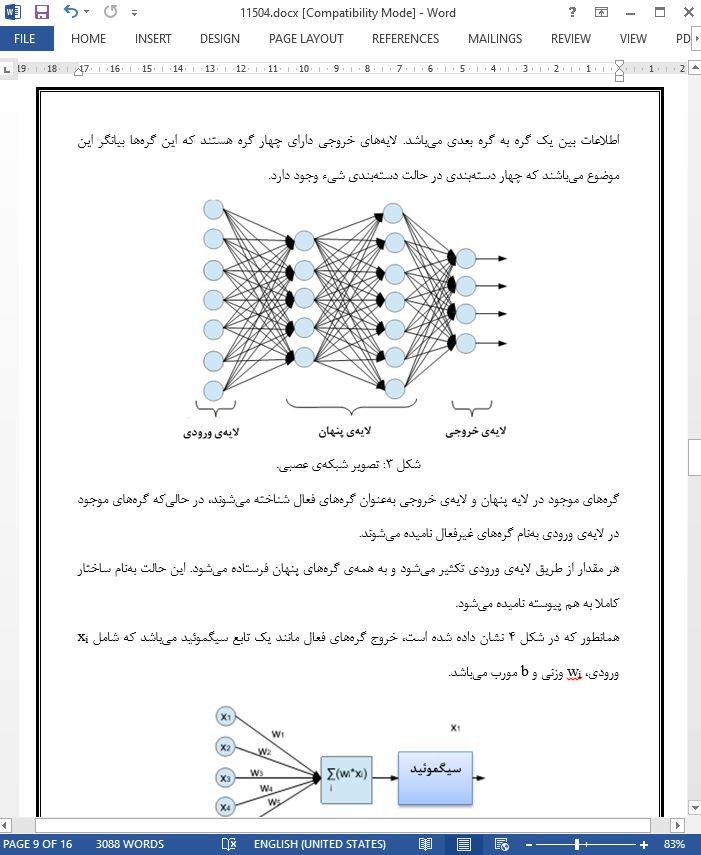
الف) یادگیری عمیق و ساختار شبکه
ب) مجموعه داده و داده افزایی
4- نتایج تجربی
الف) پهباد و دوربین پانورامیک 360 درجه
ب) نتایج تشخیص ماهی
ج) بحث در مورد پهبادهای دیگر
5- نتیجهگیری
ABSTRACT
I. INTRODUCTION
II. DESIGN OF THE UNDERWATER DRONE
A. BASIC COMPUTE MODULE AND EXTENSIONS
B. FRAME DESIGN
C. 360-DEGREE PANORAMIC IMAGE GENERATION
III. AUTOMATIC FISH RECOGNITION BASED ON DEEP LEARNING
B. DATA SET AND DATA AUGMENTATION
IV. EXPERIMENTAL RESULTS
A. DRONE AND 360-DEGREE PANORAMIC CAMERA
B. FISH RECOGNITION RESULTS
C. DISCUSSION WITH OTHER DRONES
V. CONCLUSION
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه