
شناسایی جریان مبتنی بر FPGA سرعت بالا برای آزمایشگاه
چکیده
الگوریتم های بینایی ماشینی مزیت های مهمی را برای سیستم های آزمایشگاه روی تراشه (LoC) با خودکارسازی فرآیند عملیاتی فراهم می کنند. این مقاله پیاده سازی شناسایی جریان بینایی ماشین مبتنی بر FPGA را برای آزمایش های ریزسیال شناسی (میکروفلوئودیک) آزمایشگاه بر روی تراشه (LoC) ارائه می کند. ما معماری جدیدی را پیشنهاد می دهیم و پیاده سازی می کنیم که قابلیت های موازی سازی FPGA مدرن را به کار می گیرد و از منابع دستگاه برای دستیابی به جمع آوری لحظه ای داده ها در رزولوشن های مگاپیکسلی با نرخ حداکثر 30 هزار فریم در ثانیه استفاده می کند.
1. مقدمه
آزمایشگاه بر روی تراشه (LoC) میکروفلوئیدی (ریزسیال شناختی) مزیت های مهمی را برای تشخیص بالینی با ارائه مزیت های کوچک سازی و خودکارسازی و امکان اجرای آزمایش های پیچیده بیولوژیکی در یک محیط یکپارچخ در نقطه مراقب (PoC) فراهم می کند. کنترل سیال های بیولوژیکی از طریق شناسایی حرکت اغلب از حسگرهای نقطه ای (موانع نوری، الکترومکانیکی و غیره) استفاده می کند که دارای معایب متعددی همچون کاهش رزولوشن اندازه گیری، قابلیت های محدود اطلاعاتی و قیمت بالاتر هستند. در سال ها اخیر گروه های تحقیقاتی مختلفی از راهکارهای بینایی ماشینی برای استخراج اطلاعات و کنترل فعال کننده استفاده کرده اند به طوری که مزیت های قابل توجهی را در مقایسه با روش های پیشین همانند افزایش دقت و پاسخ لحظه ای ارائه می کنند.
6. نتیجه گیری
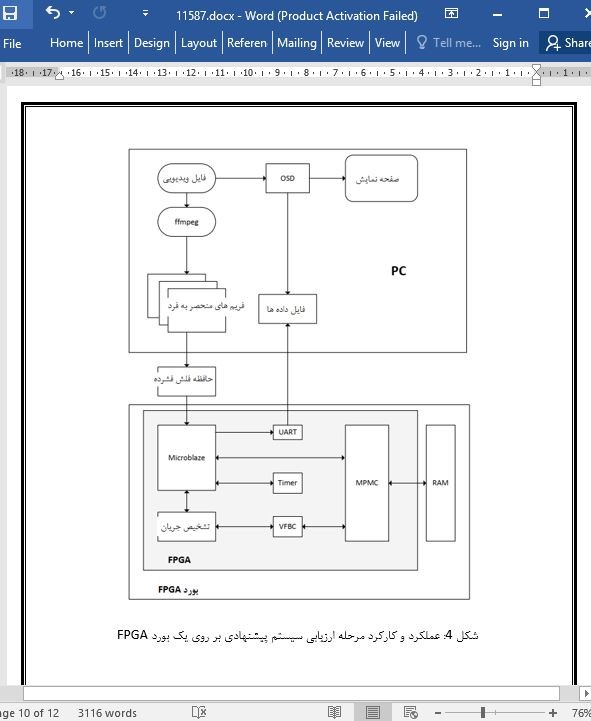
در این مقاله یک سیستم تشخیص جریان بینایی ماشینی مبتنی بر FPGA برای ازمایش های ریزسیال شناسی آزمایشگاه بر روی تراشه پیشنهاد داده شده و پیاده سازی شده است و از چندین سیال سرعت بالا به صورت همزمان پشتیبانی می کند. مرحله آزمایش پیاده سازی برای ارزیابی عملکرد و کارکرد سیستم بر روی بورد توسعه XUPV5 FPGA با استفاده از تجهیز Virtex-5 FPGA طراحی شده است. نتایج به دست آمده به طور آشکار قابلیت های شناسایی سرعت بالا و استحکام سیستم را نشان می دهد به طوری که نرخ فریم به 30 kfps بری مجموعه پارامترهای متداول می رسد و عملکرد قابل توجه و مزیت های خودکارسازی را برای کاربری های تشخیص مولکولی فراهم می کند. اثر ناحیه کوچک وحداقل استفاده از حافظه بر روی تراشه فضای کافی را برای پیاده سازی سیستم های بزرگتر بر روی همان تراشه فراهم می کند.
Abstract
Machine vision algorithms provide significant benefits for Lab-on-Chip (LoC) systems by automating the experimental process. This paper presents an FPGA-based machine vision flow detection implementation for microfluidic Lab-on-Chip (LoC) experiments. We propose and implement a novel architecture that exploits modern FPGA parallelism capabilities and makes efficient use of device resources to achieve real-time data collection in megapixel resolutions, at rates exceeding 30000 frames per second.
I. INTRODUCTION
MICROFLUIDIC Labs-on-Chip offer significant advantages to clinical diagnostics by bringing the benefits of miniaturization and automation and enabling the execution of complicated biological experiments in an integrated environment at the Point-of-Care (PoC). Control of biological fluids through motion detection, often makes use of point sensors (light barrier, electromechanical, etc.), which have several disadvantages like reduced measurement resolution, limited information capabilities and higher cost. In recent years, various research groups have used machine vision solutions for information extraction and actuator control, which offer significant benefits compared to previous approaches, like increased precision and real-time response.
VI. CONCLUSION
In this paper, an FPGA-based machine vision flow detection system for microfluidic Lab-on-Chip experiments, was proposed and implemented, supporting multiple simultaneous high-speed fluids, a first to our knowledge in relevant literature. An implementation test setup was designed to evaluate the performance and functionality of the system on an XUPV5 FPGA development board, using a Virtex-5 FPGA device. The obtained results clearly demonstrate the high speed detection capabilities and robustness of the system, with frame rates approaching and exceeding 30kfps for common parameter sets, providing significant performance and automation advantages to molecular diagnostics applications. The small area footprint and minimal on-chip memory utilization, provide adequate space for larger systems to be implemented on the same chip.
(جهت بزرگ نمایی روی عکس کلیک نمایید)
چکیده
1. مقدمه
2. اصول بنیادین الگوریتم
A. بازیابی داده های ویدیویی
B. فایل ورودی و پارامترهای
C. تعیین مشخصات جریان و نقاط هشدار
D. پنجره شناسایی
3. پیاده سازی پیشنهادی
A. بارگذاری فریم فعلی
B. کم کردن فریم
C. شناسایی جریان
D. شناسایی نقطه هشدار
E. تنظیم مستطیل پنجره
F. ذخیره سازی فریم فعلی
4. عملکرد و تحلیل
5. نتایج تجربی
6. نتیجه گیری
Abstract
I. INTRODUCTION
II. ALGORITHM FUNDAMENTALS
A. Video data retrieval
B. Input file and parameters
C. Flow characterization and alarm points
D. Detection window
III. PROPOSED IMPLEMENTATION
A. Current frame loading
B. Frame subtraction
C. Flow detection
D. Alarm point detection
E. Window rectangle adjustment
F. Current frame storage
IV. PERFORMANCE AND AREA ANALYSIS
V. EXPERIMENTAL RESULTS
VI. CONCLUSION
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه