
دانلود مقاله پوشش، قابلیت بقا، و زمان واکنش: مطالعه ای مقایسه ای از آمار عملکرد مورد استفاده در مدل های مکانیابی آمبولانس
چکیده
واکنش سریع به وضعیتهای اوراژانسی پزشکی، یکی از اهداف اصلی سیستمهای خدمات اورژانس پزشکی (EMS) است. توانایی ارائه واکنش به موقع، از اندازه ناوگان و مکانهای آمبولانسها تاثیر میپذیرد. تحقیقات در زمینه مکانیابی آمبولانس، تحت تاثیر مدلهایی هستند که یا پوشش را ماکسیممسازی میکنند یا پوشش در محدوده یک آستانه را تضمین میکنند. کارهای اخیر، هدف را از ماکسیممسازی پوشش به بهبود قابلیت بقای بیمار شیفت دادهاند. در این مقاله، عملکرد سه هدف مدل مکانیابی آمبولانس جدید را با استفاده از یک چارچوب بهینهسازی-شبیهسازی مقایسه میکنیم. یافتههای ما نشان میدهند که هدف ماکسیمم قابلیت بقا دارای عملکرد بهتری در هر دو متریک پوشش و قابلیت بقا است. علاوهبراین، نتایج همچنین از استفاده از هدف قابلیت بقا برای اوپراتورهای آمبولانس با آمبولانس-محدود پشتیبانی میکنند.
1. پیشگفتار
واکنش سریع به وضعیتهای اورژانسی پزشکی، یکی از اهداف اصلی سیستمهای خدمات اورژانس پزشکی (EMS) است. اگرچه هیچ زمان واکنش (RT) استاندارد جهانی وجود ندارد، در ایالات متحده، اکثر فراهم کنندگان EMS از استاندارد 1710 انجمن ملی حفاظت از آتش [1] استفاده میکنند که برای 90 درصد از تماسهای تهدید کننده زندگی، 8 دقیقه و 59 ثانیه است. فراهم کنندگان EMS به طور روتین تعداد تماسهای رسیدگی شده در محدوده آستانههای زمان واکنش (RTT) را به عنوان آمار عملکرد کلیدی گزارش میدهند. در نتیجه، تحقیقات مدلهای EMS در گذشته عمدتا روی بهبود عملکرد در برابر معیارهای از پیش مشخص شده RTT و «پوشش» تمرکز داشتهاند [4-2].
5. نتیجهگیریها
در این مقاله، یک مدل شبیهسازی عملیات EMS را برای مقایسه عملکرد سه هدف معروف مدل مکانیابی در تحقیقات اخیر توسعه دادیم: ماکسیممسازی پوشش، مینیممسازی متوسط زمان واکنش، و ماکسیممسازی قابلیت بقا. این مدل شبیهسازی، چند فرضیه سادهسازی شده لازم در مدلهای تحلیلی را حذف کرد. خروجی تولید شده از این مدل شبیهسازی، ما را قادر به تجزیه و تحلیل آمار پوشش و قابلیت بقا برای بازههای مختلف زمان واکنش ساخت. این امر ما را قادر به شناخت بهتر تفاوتهای بین اهداف سه مدل با توجه به دادههای ارائه شده ساخت که این دادهها بسته به روز و زمان هفته به شدت متغیر بودند. ما اهداف را روی چهار معیار مورد ارزیابی قرار دادیم: 1) درصد تماسهای پوشش داده شده، 2) قابلیت بقا، 2) متوسط زمان واکنش، و 4) بالانس بار کاری در میان ناوگان. یافتههای ما نشان میدهند که هدف ماکسیمم قابلیت بقا برتر از دو هدف دیگر است. هدف ماکسیمم قابلیت بقا در هر چهار معیار منطبق با دو هدف دیگر یا به طور قابل توجهی بهتر از آنها است. جدول 5، نتایج تجربی و رتبهبندیهای ما از چهار هدف را طبق عملکرد آنها با توجه به چهار معیار ارائه میدهد. لازم به ذکر است که هدف مینیممسازی متوسط زمان واکنش، در عین حال که عملکرد خوبی در سه مورد از چهار معیار دارد، مستلزم قربانی کردن بیشتر پوشش به منظور دستیابی به هدف خود است. هدف ماکسیمم پوشش دارای بدترین عملکرد در سه معیار از چهار معیار بود.
Abstract
Rapid response to medical emergencies is one of the main goals of Emergency Medical Service (EMS) systems. Ability to provide timely response is affected by fleet size and the locations of the ambulances. Literature on ambulance location has been dominated by models which either maximize coverage, or guarantee coverage within some threshold. Recent work has shifted the objective from maximizing coverage to improving patient survivability. In this paper we compare the performance of three recent ambulance location model objectives by applying a simulation–optimization framework. Our findings show that the maximum survivability objective performs better in both survivability and coverage metrics. Further, the results also support using the survivability objective for resource constrained ambulance operators.
1. Introduction
Rapid response to medical emergencies is one of the main goals of Emergency Medical Service (EMS) systems. Although, there is no global standardized response time (RT), in the US most EMS providers adopt the National Fire Protection Association’s 1710 standard. [1], which is 8 min 59 s for 90% of life threatening calls. EMS providers routinely report the number of calls they reached within the response time thresholds (RTT) as a key performance statistic. Consequently, research of EMS models in the past has predominantly focused on improving performance against prespecified RTT and ‘‘coverage’’ criteria [2–4].
5. Conclusions
In this paper, we developed a simulation model of the EMS operations to compare the performance of three well-known location model objectives in the recent literature: Maximum Coverage, Minimum Average Response Time, and Maximum Survivability. The simulation model removed several simplifying assumptions that are necessary in analytical models. The output generated from the simulation model enabled us to analyze coverage and survivability statistics for various response time intervals. This enabled us to better understand the differences between the objectives of the three models with respect to the given data which was highly variable depending on the day and time of the week. We evaluated the objectives on four criteria: (1) Percentage of calls covered, (2) Survivability, (3) Average Response Time, and (3)Workload balance among the fleet. Our findings show that the Maximum Survivability objective is superior to the other two objectives. The Maximum Survivability objective matched or performed significantly better than the other two objectives in all the four criteria. Table 5 summarizes our experimental results and rankings of the four objectives according to their performance with respect to the four criteria. It should be noted that the Minimum Average Response Time objective, while performing well in three of the four criteria, requires a larger sacrifice in coverage to achieve its goals. The Maximum Coverage objective performed the worst in three of the four criteria.
(جهت بزرگ نمایی روی عکس کلیک نمایید)
چکیده
1. پیشگفتار
2. مرور تحقیقات
3. متدلوژی تحقیق
3.1. الگوریتم بهینهسازی
3.2. روال جستجوی tabu واکنشی (RTS)
3.3. یک الگوریتم جستجوی محلی
4. نتایج
4.1. تاثیر روی پوشش
4.2. تاثیر روی قابلیت بقا
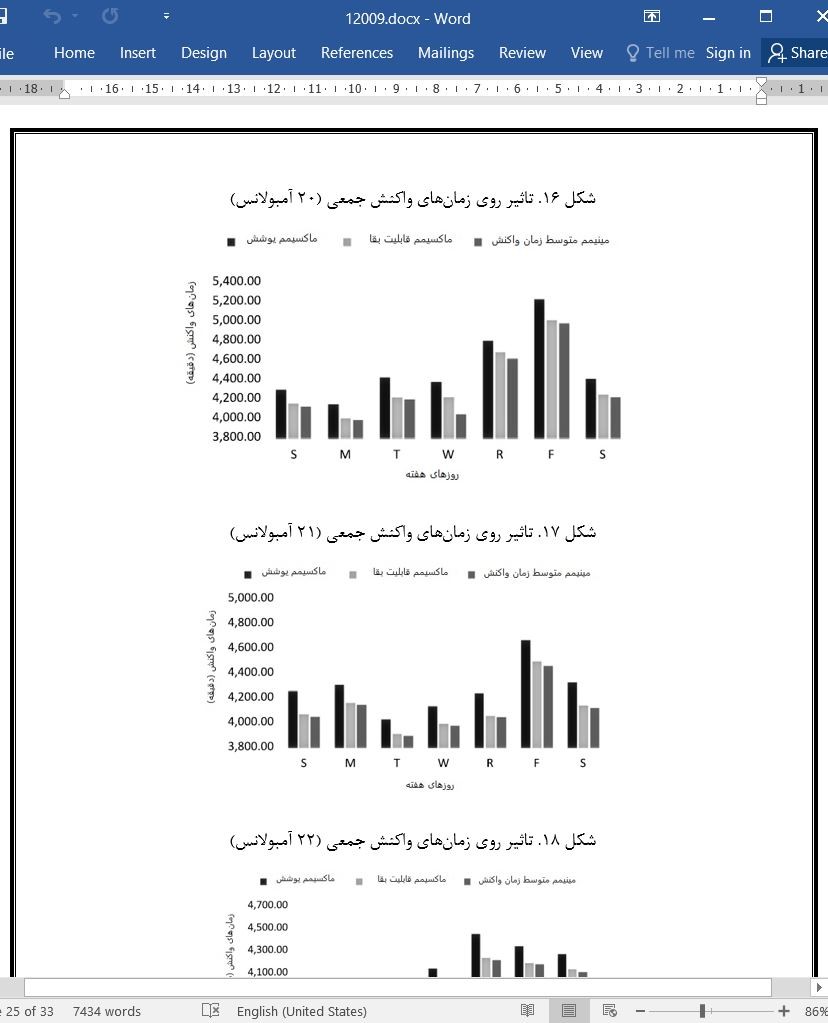
4.3. تاثیر روی متوسط زمانهای واکنش
4.4. تاثیر روی بالانس (تعادل) بار کاری
4.5. مقایسه زمانهای واکنش شبیهسازی شده با زمانهای واکنش واقعی
5. نتیجهگیریها
منابع
Abstract
1. Introduction
2. Literature review
3. Research methodology
3.1. Optimization algorithm
3.2. The Reactive Tabu Search (RTS) procedure
3.3. A local search algorithm
4. Results
4.1. Impact on coverage
4.2. Impact on survivability
4.3. Impact on average response times
4.4. Impact on workload balance
4.5. Comparing simulated response times to actual response times
5. Conclusions
Acknowledgments
Appendix. ANOVA tables (significance and observed power columns only)
References
- اصل مقاله انگلیسی با فرمت ورد (word) با قابلیت ویرایش
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه