
اختصاص دینامیکی کنترل کننده تابع برای ارتقاء استحکام صفحه در شبکه تعریف شده نرم افزاری
چکیده
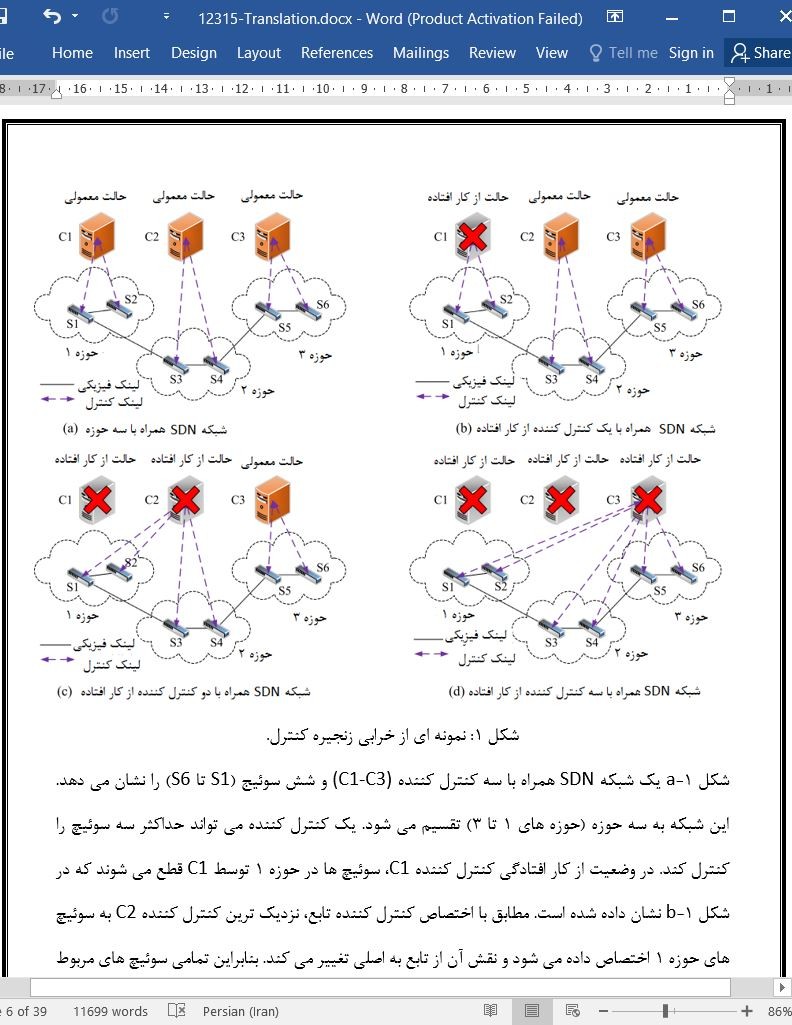
چند کنتری یک راهکار صفحه کنترل مقیاس پذیر برای شبکه تعریف شده نرم افزاری (SDN) در مقیاس بزرگ است. یک سوئیچ SDN برای دستیابی به انعطاف پذیری بالا می تواند به یک کنترل کننده اصلی (مستر) برای عملیت معمولی و یک کنترل کننده تابع (اسلیو) که از کارکرد کنترل کننده اصلی بک آپ می گیرد متصل شود. هنگامی که کنترل کننده اصلی از کار می افتد، یکی از کنترل کننده های تابع به سوئیچ ها اختصاص داده می شوند تا به عنوان کنترل کننده اصلی کار کنند. با این حال، اختصاص کنترل کننده تابع نامناسب می تواند سبب از کار افتادن زنجیره کنترل کننده شود به طوری که خارج از ظرفیت کنترل کننده اختصاص یافته کار کند و حتی سبب ایجاد اختلال در شبکه شود. در این مقاله اختصاص دینامیکی کنترل کننده تابع را پیشنهاد می دهیم که با طراحی اختصاص کنترل کننده تابع پیش از خرابی کنترل کننده از اختلال در شبکه جلوگیری می کند. ما ابتدا پدیده خرابی زنجیره کننده کننده را توصیف می کنیم: به دلیل اختصاص غیر منطقی کنترل کننده تابع، ممکن است کل شبکه هنگامی که یک کنترل کننده از کار می افتد دچار اختلال شود. برای جلوگیری از این پدیده، مساله اختصاص کنترل کننده تابع را به عنوان یک مساله بهینه سازی ترکیبی چند هدفه فرموله می کنیم که تاخیر، توازن بار و استحکام را در نظر می گیرد و پیچیدگی کامل NP آن را اثبات می کند. ما این مساله را توسط روش اختصاص دینامیکی کنترل کننده تابع (DSCA) حل می کنیم. این روش ابتدا از کار افتادگی های کنترل کننده در ماژول تشخیص خطا را بررسی می کند، سپس اختصاص انعطاف پذیر تابع را کامل می کند و اختصاص تابع جدید را برای سوئیچ ها در ماژول اختصاص اسلیو کارآمد تولید می کند. در نهایت در ماژول تنظیم نقش، نقش برخی از کنترل کننده ها را تغییر می دهد و سوئیچ ها را مجدداً متصل می کند. نتایج شبیه سازی نشان می دهد که راهکار پیشنهادی می تواند بدترین تاخیر موردی را تحت خرابی های کنترل کننده به میزان متوسط 35.1 درصد کاهش دهد و احتمال اختلال در شبکه را کم کند.
7. نتیجه گیری
در این مقاله تلاش می کنیم تا عملکرد تحمل خطا مربوط به صفحه کنترل را از نظر اختصاص کنترل کننده تابع بهبود دهیم و یک روش اختصاص دینامیک کنترل کننده تابع (DSCA) را پیشنهاد می دهیم. در ابتدا پدیده خرابی زنجیره کنترل کننده را توصیف می کنیم که به دلیل از کار افتادگی کنترل ایجاد شده است که می تواند سبب خرابی کل شبکه شود. ما از طریق تحلیل ها در می یابیم که اختصاص کنترل کننده تابع نکته کلیدی در تضمین عملکرد با قابلیت تحمل خطا در صفحه کنترل است. سپس مساله SCA را با در نظر گرفتن تاخیر، توازن بار و استحکام به عنوان یک بهینه سازی چند هدفه فرموله می کنیم. علاوه بر این، روش DSCA برای حل موثر مساله SCA پیشنهاد می شود و به سه ماژول شامل تشخیص حالت، اختصاص تابع کارآمد و تنظیم نقش تقسیم می شود. مهم تر این که الگوریتم های اکتشافی بهبود یافته در ماژول های مربوطه بارگذاری می شوند تا کارآیی را افزایش دهند. نتایج شبیه سازی نشان می دهد که روش DSCA در مقایسه با روش های دیگر می تواند به طور موثر عملکرد تحمل خطای صفحه کنترل را تضمین کند و تاثیر از کار افتاد گی کنترل کننده بر کل شبکه را به حداقل برساند.
در کار آتی ما قصد داریم تا دیدگاه های بیشتری در مدل نظری قرار دهیم و روش DSCA را به شبکه بزرگتر همراه با ترافیک واقعی تر برای ارزیابی عملکرد آن توسعه دهیم.
Abstract
Multi-controller is a scalable control plane solution for the large-scale Software-Defined Networking (SDN). To achieve high resilience, an SDN switch can connect one master controller for normal operation and one slave controller that backup the function of the master controller. Once the master controller fails, one of the slave controllers will be assigned to switches to works as the new master controller. However, the inappropriate slave controller assignment may cause controller chain failure, where running out of the capacity of the assigned controller, even crash the entire network. In this paper, we propose a dynamic slave controller assignment that prevents the network crash by planning slave controller assignment ahead of the controller failures. We first describe the controller chain failure phenomenon: due to unreasonable slave controller assignment, the entire network may crash when one controller fails. To prevent the phenomenon, we formulate the slave controller assignment problem as a multi-objective mixed optimization problem that considers latency, load balancing and robustness, and prove its NP-complete complexity. We solve the problem with a dynamic slave controller assignment (DSCA) scheme. It firstly checks whether there are controller failures in state detection module, then completes the elastic slave assignment and generates a new slave assignment for switches in efficient slave assignment module. Finally, in role adjustment module, it changes the roles of some controllers and reconnects switches. Simulation results show our solution can decrease the worst case latency under controller failures by 35.1% averagely, and reduce the probability of network crash.
7. Conclusion
In this paper, we attempt to improve the fault-tolerant performance of control plane from the perspective of slave controller assignment and propose a dynamic slave controller assignment (DSCA) scheme. Firstly, we describe controller chain failure phenomenon caused by controller failure, which may crash the entire network. Through analyses, we find that rational slave controller assignment is the key to guarantee the fault-tolerant performance of control plane. Then, we formulate the SCA problem, considering latency, load balancing and robustness, as a multi-objective mixed optimization. Further, DSCA is proposed to effectively solve the SCA problem, and it can be divided into three modules including state detection, efficient slave assignment and role adjustment. More importantly, the improved heuristic algorithms are loaded on the corresponding modules to increase efficiency. Simulation results show that, compared with other schemes, DSCA can effectively ensure the fault-tolerant performance of control plane and minimize the impact of controller failure on the entire network.
In future work, we plan to provide more insights into the theoretical model and extend DSCA scheme to a large-scale network with more real traffic to evaluate its performance.
(جهت بزرگ نمایی روی عکس کلیک نمایید)
چکیده
1. مقدمه
2. انگیزه
1-2 از کار افتادگی زنجیره کنترل کننده
2-2 نیاز به بهبود اختصاص کنترل کننده تابع
3. مدل سازی و اطلاعات
1-3 مدل شبکه
2-3 فرمول اختصاص کنترل کننده تابع
1-2-3 تاخیر بین سوئیچ و کنترل کننده
2-2-3 توازن بار کنترل کننده
3-2-3 استحکام اختصاص کنترل کننده تابع
4-2-3 فرموله کردن مساله SCA
4. تخصیص دینامیکی کنترل کننده تابع
1-4 مروری بر روش DSCA
2-4 ماژول تشخیص حالت
3-4 ماژول اختصاص تابع کارآمد
1-3-4 کدگذاری کنترل کننده تابع
2-3-4 اصل تغییر دما
3-3-4 الگوریتم تبرید شبیه سازی شده (SSA) با آگاهی از حالت
4-4 ماژول تنظیم نقش
5. شبیه سازی و ارزیابی
1-5 ساختار شبیه سازی
2-5 نتایج شبیه سازی
1-2-5 تاخیر
2-2-5 توازن بار کنترل کننده
3-2-5 احتمال خرابی شبکه
4-2-5 عملکرد اکتشافی
6. کارهای مرتبط
1-6 صفحه کنترل قابل اطمینان
2-6 طراحی غلبه بر خطا مربوط به صفحه کنترل
7. نتیجه گیری
منابع
ABSTRACT
1. Introduction
2. Motivation
2.1. Controller chain failure
2.2. Requirement for improving slave controller assignment
3. Modeling and formulation
3.1. Network model
3.2. Slave controller assignment formulation
3.2.1. Latency between switch and controller
3.2.2. Controller load balancing
3.2.3. Robustness of slave controller assignment
3.2.4. The SCA problem formulation
4. Dynamic slave controller assignment
4.1. Overview of DSCA
4.2. State detection module
4.3. Efficient slave assignment module
4.3.1. Slave controller encoding
4.3.2. Temperature changing principle
4.3.3. State-aware simulated annealing (SSA) algorithm
4.4. Role adjustment module
5. Simulation and evaluation
5.1. Simulation setting
5.2. Simulation results
5.2.1. Latency
5.2.2. Controller load balancing
5.2.3. Network crash probability
5.2.4. Performance of heuristic
6. Related work
6.1. Reliable control plane
6.2. Failover design of control plane
7. Conclusion
References
- اصل مقاله انگلیسی با فرمت ورد (word) با قابلیت ویرایش
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه