
دانلود مقاله مکان یابی توزیع شده در شبکه های حسگر بی سیم
چکیده
این مقاله به مطالعه مساله تعیین مکانهای گره در شبکههای حسگر تک کاره میپردازد. سه الگوریتم کانیابی توزیع شده (موقعیتیابی تک کاره، موقعیتیابی نیرومند، و مالتی لتریشن N-هاپ ) را روی یک پلت فرم شبیهسازی منفرد مقایسه میکنیم. این الگوریتمها دارای ساختار سه مرحلهای مشترکی هستند: 1) تعیین فواصل گره-لنگر ، 2) محاسبه موقعیتهای گره، و 3) اصلاح اختیاری موقعیتها از طریق روالی تکراری. تجزیه و تحلیل دقیقی را با مقایسه گزینههای مختلف برای هر مرحله، و همچنین مقایسه پایاپایی را از الگوریتمهای کامل ارائه میدهیم. نتیجهگیری اصلی این است که هیچ الگوریتم منفردی دارای بهترین عملکرد نیست؛ و الگوریتم بسته به شرایط (خطاهای دامنه، اتصال، کسر لنگر، و غیره) ترجیح داده میشود. با این حال، در هر صورت، فضای قابل توجهی برای بهبود دقت و/یا افزایش پوشش وجود دارد.
1. پیشگفتار
شبکههای حسگر بیسیم، وعده بسیاری از برنامههای کاربردی جدید را در حوزه نظارت و کنترل ارائه میدهند. شامل ردیابی هدف، تشخیص نفوذ، نظارت سکونتگاه حیات وحش، کنترل جو، و مدیریت بلایا از جمله این برنامهها هستند. فناوری زیربنایی محرک ظهور برنامههای کاربرد حسگر، توسعه سریع در ادغام مدارهای دیجیتال است که گرههای حسگر کوچک، ارزان، و مستقلی را در آینده نزدیک برای ما به همراه خواهد داشت.
فناوری جدید، فرصتهای جدیدی را ارائه میدهد، اما مشکلات جدیدی را نیز معرفی میکند. این امر به ویژه در مورد شبکههای حسگر برقرار است که در آنها قابلیتهای گرههای فردی بسیار محدود هستند. از اینرو، نیاز به مشارکت بین گرهها است، اما حفظ انرژی، دغدغهای مهم است که دلالت بر این دارد که ارتباطات باید به حداقل برسند. این اهداف متعارض نیاز به راهحلهای غیر ارتدکس (نامعمول) برای بسیاری از وضعیتها دارند.
6. نتیجهگیریها
شبکههای حسگر بیسیم، وعده بسیاری برنامههای کاربردی جدید را در حوزه نظارت و کنترل ارائه میدهند. با این حال، محدودیتهای فیزیکی گرههای حسگر، نیاز به راهحلهای ارتدکس برای بسیاری از مسائل دارند. این مقاله، مساله مکانیابی در شبکههای حسگر بیسیم تک کاره را مورد بررسی قرار میدهد. از الگوریتمهای مکانیابی شناخته شده ارائه شده به طور ویژه برای شبکههای حسگر، سه رویکرد را انتخاب کردیک که الزامات اساسی برای خود-سازماندهی، نیرومندی و انرژی به صرفگی را براورده میکنند: موقعیتیابی تک-کاره [10]، موقعیتیابی نیرومند [11]، و مالتی لتریشن N-هاپ [12]. اگرچه این سه الگوریتم به صورت مستقل توسعه یافتند، متوجه شدیم که ساختار مشترکی دارند. ما قادر به شناسایی یک رویکرد عمومی 3-مرحلهای برای تعیین موقعیتهای گره فردی متشکل از گامها زیر هستیم:
1. تعیین فواصل بین گرههای نامعلوم و گرههای لنگر.
2. به دست آوردن یک موقعیت برای هر گره از فواصل لنگر آن.
3. اصلاح موقعیتهای گره با استفاده اطلاعات درباره دامنه (فاصله) تا گرههای همسایه و موقعیتهای گرههای همسایه.
Abstract
This paper studies the problem of determining the node locations in ad-hoc sensor networks. We compare three distributed localization algorithms (Ad-hoc positioning, Robust positioning, and N-hop multilateration) on a single simulation platform. The algorithms share a common, three-phase structure: (1) determine node–anchor distances, (2) compute node positions, and (3) optionally refine the positions through an iterative procedure. We present a detailed analysis comparing the various alternatives for each phase, as well as a head-to-head comparison of the complete algorithms. The main conclusion is that no single algorithm performs best; which algorithm is to be preferred depends on the conditions (range errors, connectivity, anchor fraction, etc.). In each case, however, there is significant room for improving accuracy and/or increasing coverage.
1. Introduction
Wireless sensor networks hold the promise of many new applications in the area of monitoring and control. Examples include target tracking, intrusion detection, wildlife habitat monitoring, climate control, and disaster management. The underlying technology that drives the emergence of sensor applications is the rapid development in the integration of digital circuitry, which will bring us small, cheap, autonomous sensor nodes in the near future.
New technology offers new opportunities, but it also introduces new problems. This is particularly true for sensor networks where the capabilities of individual nodes are very limited. Hence, collaboration between nodes is required, but energy conservation is a major concern, which implies that communication should be minimized. These conflicting objectives require unorthodox solutions for many situations.
6. Conclusions
Wireless sensor networks hold the promise of many new applications in the area of monitoring and control. The physical limitations of the sensor nodes, however, require unorthodox solutions for many problems. This paper addressed the issue of localization in ad-hoc wireless sensor networks. From the known localization algorithms specifically proposed for sensor networks we selected the three approaches that meet basic requirements for self-organization, robustness, and energy-efficiency: Ad-hoc positioning [10], Robust positioning [11], and N-hop multilateration [12]. Although these three algorithms were developed independently, we found that they share a common structure. We were able to identify a generic, 3- phase approach to determine the individual node positions consisting of the steps below:
1. Determine the distances between unknowns and anchor nodes.
2. Derive for each node a position from its anchor distances.
3. Refine the node positions using information about the range to, and positions of, neighboring nodes.
(جهت بزرگ نمایی روی عکس کلیک نمایید)
چکیده
1. پیشگفتار
2. الگوریتمهای مکانیابی
2.1. رویکرد عمومی
2.2. مرحله 1: فاصله با لنگرها
2.2.1. Sum-dist
2.2.2. DV-هاپ
2.2.3. اقلیدسی
2.3. مرحله 2: موقعیت گره
2.3.1. لتریشن
2.3.2. Min-Max
2.4. مرحله 3: اصلاح
3. محیط شبیهسازی
4. نتایج
4.1. مرحله 1: فاصله تا لنگرها
4.1.1. Sum-dist
4.1.2. DV-هاپ
4.1.3. اقلیدسی
4.2. مرحله 2: موقعیت گره
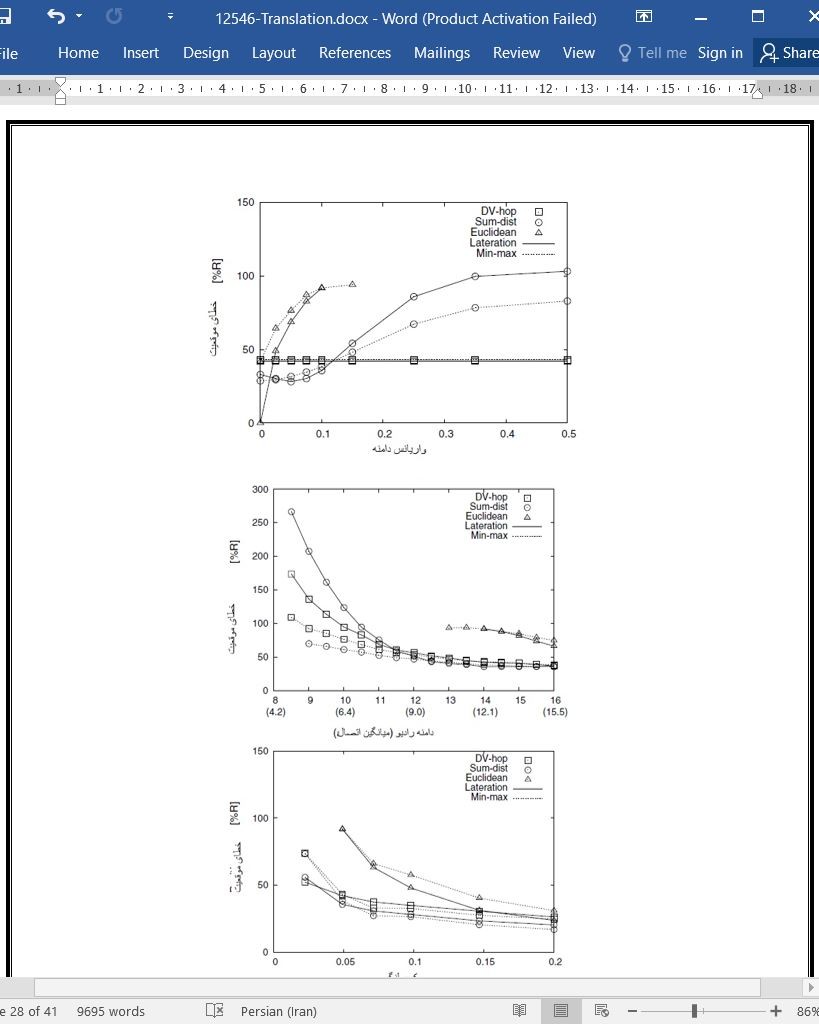
4.2.1. خطاهای فاصله
4.2.2. جایگذاری لنگر
5. بحث
5.1. ترکیب مراحل 1 و 2
5.1.1. پوشش
5.1.2. درستی
5.2. مرحله 3: اصلاح
5.3. هزینه ارتباطات
5.4. توصیهها
6. نتیجهگیریها
منابع
Abstract
1. Introduction
2. Localization algorithms
2.1. Generic approach
2.2. Phase 1: Distance to anchors
2.2.1. Sum-dist
2.2.2. DV-hop
2.2.3. Euclidean
2.3. Phase 2: Node position
2.3.1. Lateration
2.3.2. Min–max
2.4. Phase 3: Refinement
3. Simulation environment
4. Results
4.1. Phase 1: Distance to anchors
4.1.1. Sum-dist
4.1.2. DV-hop
4.1.3. Euclidean
4.2. Phase 2: Node position
4.2.1. Distance errors
4.2.2. Anchor placement
5. Discussion
5.1. Phases 1 and 2 combined
5.1.1. Coverage
5.1.2. Accuracy
5.2. Phase 3: Refinement
5.3. Communication cost
5.4. Recommendations
6. Conclusions
References
- اصل مقاله انگلیسی با فرمت ورد (word) با قابلیت ویرایش
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه