
دانلود مقاله استخوان خارجی برای کاربردهای صنعتی و تاثیرات آن بر حجم کار فیزیکی
چکیده
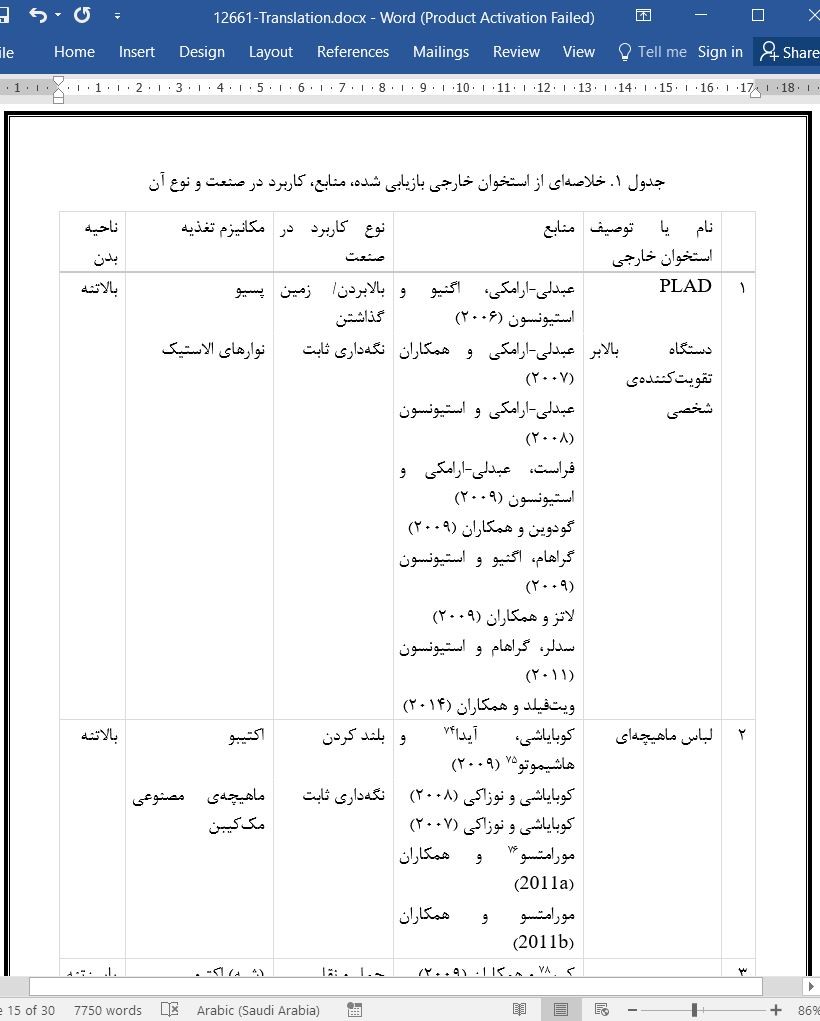
هدف این مقاله، ارائهی یک بررسی جامع و کلی از استخوان خارجی کمکی، که بهطور خاص برای کاربردها و اهداف صنعتی توسعه یافته، و ارزیابی اثرات بالقوهی آن در کاهش بار فیزیکی تحمیلی بر بدن است. این بررسی نتایج 40 مقاله را دربرمیگیرد که شامل 26 استخوان خارجی صنعتی متفاوت بوده که 19 مورد آن اکتیو (فعال ) و 7 مورد آن پسیو (غیرفعال) است. برای 13 استخوان خارجی تاثیر بار فیزیکی، عمدتاً از نظر فعالیت عضلانی، بررسی شده است. هدفِ بازیابی تمام استخوانهای خارجی پسیو، پشتیبانی و تقویت کمر بوده است. ده الی چهل درصد کاهش در فعالیت عضلانی کمر، هنگام بلند کردن پویا و نگهداشتن ثابت گزارش شده است. هر دوی پایینتنه و بالاتنهی بدن از مزایای استخوان خارجی اکتیو بهرهمند میشوند. کاهش فعالیت ماهیچه تا 80% بهعنوان اثر استخوان خارجی اکتیو گزارش شده است. استخوان خارجی از پتانسیل کاهش عوامل مربوط به آسیبهای ماهیچهایاسکلتی مرتبط با کار برخوردار است.
خلاصه متخصص
در سراسر جهان، علاقهی وافری به استخوان خارجی صنعتی وجود دارد، اما فقدان استاندارهای ایمنی مشخص و برخی مسائل فنی موانع اصلی عدم استفاده از آن در صنعت است. برخی از این مسائل عبارتند از: راحت نبودن (برای استخوان خارجی پسیو و اکتیو)، وزن دستگاه، همراستایی با آناتومی و سینماتیک انسان، و تشخیص مقصود انسان برای فعالسازی حرکت روان (برای استخوان خارجی اکتیو).
1. مقدمه
علیرغم روند روز افزون خودکارسازی و مکانیزهشدن در صنعت، کارگران بسیاری در معرض حجم کار فیزیکی به خاطر ادارهی مواد (بیش از 30% جمعیت کارگر در اتحادیهی اروپا)، حرکات تکراری (63%) و حالت و وضعیت نامتعارف بدن (46%) قرار دارند (یوروفاند 2012). این دادهها در دههی گذشته ثابت بوده و بر این واقعیت دلالت میکنند که اختلالات ماهیچهایاسکلتی مرتبط به کار بر تعداد قابل توجهی از کارگران تاثیر میگذارد. در اتحادیهی اروپا، سالانه بیش از 40% کارگران از کمردرد، یا درد گردن یا شانه رنج میبرند (یوروفاند 2012).
خودکارسازی کامل میتواند راهحلی برای این مشکلات باشد، ولی همیشه امکانپذیر نیست. برای مثال، در تولید پویا یا محیطهای انباری، تنوع بالای محصول و اندازههای نسبتاً کوچک سفارش سطح بالایی از انعطافپذیری را تحمیل میکند که در این حالت، یا خودکارسازی کامل امکانپذیر نبوده یا در صورت امکان، بسیار پُرهزینه است. زمانی که بهطور مداوم محصولات و وظایف تغییر میکنند، به ظرفیت انسانی برای نظارت، تصمیمگیری و اتخاذ اقدامات مناسب در کسری از ثانیه نیاز است. بنابراین، کارگران مجبور به انجام کارهایی چون سرهمبندی یا ادارهی مواد بوده و در معرض خطرات مرتبط با WMSD قرار دارند. جنبش رو به رشدی در صنعت مدرن به سمت همکاری انسان-ربات وجود دارد تا استفاده از رباتیک همراه با حفظ انعطافپذیری انسان بهبود یابد (مکدوگال 2014). یکی از راهحلهای ادارهی دستی وظایف، استفاده از استخوان خارجی است. مزیت اصلی استفاده از یک استخوان خارجی در مقابل هر نوع سیستم ربات (رباتهای کلاسیک، سیستمهای خودکار کامل یا رباتهای انساننما ) بهویژه در محیطهای پویا، برخورداری از خلاقیت و انعطافپذیری انسان است چرا که یک انسان در راس امور قرار داشته و نیازی به برنامهریزی یا آموزش ربات نیست.
4.3. اجرای عملی استخوان خارجی
علیرغم علاقه و توجه وافر به استخوان خارجی با کاربردهای صنعتی، تا اجرای مقیاس گستردهی استخوان خارجی در صنعت فاصلهی زیادی است. در واقع، تمام استخوانهای خارجی بررسی شده در این مقاله، بجز مطالعهی PLAD توسط گراهام، اگنیو و استیونسون (2009)، در محیطهای آزمایشگاهی ارزیابی شدهاند. اکثر استخوانهای خارجی بررسی شده در مرحلهی آزمایش بوده و برای استفادهی عملی آماده نیستند. ابتدا باید مسائل فنی شناسایی و حل شود.
حتی دستگاههای پسیو ساده بهطور گسترده در عمل استفاده نمیشوند. یکی از دلایل این امر، فقدان راحتی هنگام پوشیدن استخوان خارجی است. در برخی مقالات به این مسئله اشارهای شده است (برای مثال، عبدلی-ارامکی و همکاران 2007). با پیشرفتهای بیومکانیک حذف ناراحتی فیزیکی رابط کاربری دستگاه، چالش بعدی در طراحی استخوانهای خارجی خواهد بود، چرا که ممکن است کوچکترین ناراحتی، مانع پذیرش کاربر شود. هرچند این مسئله برای استخوانهای خارجی که با هدف کمک به افراد کم توان طراحی میشوند، متفاوت است، جایی که استخوان خارجی میتواند قابلیت راه رفتن یا گرفتن چیزی را تعیین کند. مسئله و نگرانی دیگر در مورد دستگاههای پسیو، پتانسیل افزایش فعالیتهای ماهیچههای پا است. این مورد به بررسی بیشتر در توسعه و تحولات بعدی محصولات آمادهی استفاده، نیازمند است.
ABSTRACT
The aim of this review was to provide an overview of assistive exoskeletons that have specifically been developed for industrial purposes and to assess the potential effect of these exoskeletons on reduction of physical loading on the body. The search resulted in 40 papers describing 26 different industrial exoskeletons, of which 19 were active (actuated) and 7 were passive (non-actuated). For 13 exoskeletons, the effect on physical loading have been evaluated, mainly in terms of muscle activity. All passive exoskeletons retrieved were aimed to support the low back. Ten-forty per cent reductions in back muscle activity during dynamic lifting and static holding have been reported. Both lower body, trunk and upper body regions could benefit from active exoskeletons. Muscle activity reductions up to 80% have been reported as an effect of active exoskeletons. Exoskeletons have the potential to considerably reduce the underlying factors associated with work-related musculoskeletal injury.
Practitioner Summary: Worldwide, a significant interest in industrial exoskeletons does exist, but a lack of specific safety standards and several technical issues hinder mainstay practical use of exoskeletons in industry. Specific issues include discomfort (for passive and active exoskeletons), weight of device, alignment with human anatomy and kinematics, and detection of human intention to enable smooth movement (for active exoskeletons).
1. Introduction
Despite the on-going trend in automation and mechanisation in industry, many workers are still exposed to physical workloads due to material handling (over 30% of the work population in the EU), repetitive movements (63%) and awkward body postures (46%) (Eurofound 2012). These data, which have been relatively stable over the past decade, contribute to the fact that work-related musculoskeletal disorders (WMSDs) still affect a considerable number of workers. In the European Union, yearly more than 40% of the workers suffer from low back pain or neck and shoulder pain (Eurofound 2012).
Full automation would solve these problems, but this is not always feasible. For instance, in dynamic manufacturing or warehousing environments, a high product mix and relatively small order sizes dictate high levels of flexibility, and in such cases, full-automation is either not possible or prohibitively expensive. In such a context of continuously varying products and tasks, the human capacity to observe, decide and adopt proper actions within split seconds, is still required. Thus, workers are still exposed to various production activities such as assembling or material handling and hence are exposed to the associated risks for developing WMSDs. There is a growing movement in modern industry towards human robot collaboration to improve use of robotics while retaining the flexibility of humans (MacDougall 2014). For manual handling tasks, one solution is to use exoskeletons. The main benefit of the application of an exoskeleton above any type of robot system (classical robots, full-automation systems or humanoid robots), would be that, specifically in dynamic environments, one will fully profit from the human’s creativity and flexibility, while he is the one I charge, and there is thus no need for robot programming or teaching of robots.
4.4. Conclusions
This review shows a wide interest in passive and active exoskeletons for industrial purposes, but most developments are at an early stage of technology development with many concepts not tested beyond the laboratory.
Passive industrial exoskeletons are aimed at supporting or unloading the lower back region and appear to be quite successful herein for both dynamic lifting or static holding activities. Some concerns have been raised regarding the potentially negative effects associated with increasing leg muscle activity, high levels of discomfort and muscle deconditioning.
The potential effect in reducing physical loads seems to be even higher for active exoskeletons. Both lower body, trunk and upper body regions could benefit from large reductions in loading.
Exoskeletons thus have the potential to considerably reduce the underlying factors associated with developing work-related musculoskeletal injuries. The true impact on potentially reducing injury prevalence, however, still needs to be determined, as until now significant technical challenges and a lack of specific safety standards stands in the way of large-scale implementation in workplaces.
(جهت بزرگ نمایی روی عکس کلیک نمایید)
چکیده
1. مقدمه
2. روشها
3. نتایج
4. بحث
4.1. تاثیر استخوان خارجی پسیو بر بار فیزیکی
4.2. تاثیر استخوان خارجی اکتیو بر بار فیزیکی
4.3. اجرای عملی استخوان خارجی
4.4. نتیجهگیری
منابع
ABSTRACT
1. Introduction
2. Methods
3. Results
4. Discussion
4.1. Effects of passive exoskeletons on physical load
4.2. Effects of active exoskeletons on physical load
4.3. Practical implementation of exoskeletons
4.4. Conclusions
References
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش، بدون آرم سایت ای ترجمه
- ترجمه فارسی مقاله با فرمت pdf، بدون آرم سایت ای ترجمه