
دانلود مقاله حمله مشارکتی نیرومند چندین موشک با اختلالات خارجی و تاخیر ارتباطی
چکیده
در این مقاله، مسئله حمله مشارکتی چندین موشک مطالعه می شود، و فرض می شود که این موشک ها از اختلالات خارجی و تاخیر ارتباطی آسیب می بینند. ابتدا یک مدل سینماتیک از چندین موشک در موقعیت اختلالات خارجی و تاخیر ارتباطی توسعه می یابد. و سپس مسئله همسویی چند موشکی براساس توپولوژی گراف جهتدار به تحلیل ثبات یک سیستم کنترل حلقه بسته تبدیل می شود. یک کنترل کننده نیرومند بازخورد وضعیت با استفاده از نابرابری ماتریس خطی طراحی می شود. در نهایت، یک شبیه سازی عددی مشخص می شود تا اثربخشی استراتژی کنترلی پیشنهادی را نشان دهد.
1. مقدمه
با توسعه سیستم های موشکی ضد هواپیمایی (AAMS) و سیستم اسلحه نزدیک (CIWS) در جهان دفاع پیروزمندانه برای یک تک موشک بسیار دشوار می شود (لیو و همکاران، 2019). مشارکت موشکی روش جدید مبارزه برای رفاه مدرن است. مشارکت موشکی می تواند چندین اطلاعات موشکی را با یکدیگر به اشتراک بگذارد تا هماهنگی تاکتیکی را پس از راه اندازی به اشتراک بگذارد و این ماموریت را به صورت گروه شکل گیری به پایان برساند. در این مورد، احتمال موفقیت از طریق دفاع و قابلیت اعتصاب موفق در برابر اهداف نظامی پیشرفت قابل توجهی بدست می آورد.
این مقاله بر حمله مشارکتی چندین موشک تحت کنترل مشارکتی تمرکز می کند. حمله با چندین موشک نسبت به حمله با یک موشک از موقعیت های مختلف، در همان زمان و با هدف مقصد نظامی مشترک دشوارتر است. حمله با چندین موشک، روشی موثر برای بهبود احتمال کامل کردن این وظیفه است. عمدتا حمله همسویی به دو روش تقسیم می شود: یک روش هدایت با استفاده از کنترل مشارکتی است، و روش دیگر هدایت کنترل زمان تاثیر (ITCG) است. کنترل مشارکتی نیاز به اتصال داده های آنلاین بین موشک ها دارد، و از طریق ارتباط با یکدیگر و تنظیم وضعیت پرواز آنها زمان ورودی را هماهنگ می کند. کنترل مشارکتی به صورت گسترده ای مطالعه شده است و می توان آن را به سه جنبه تقسیم کرد: هدایت مشارکتی زمانی (جئون و همکاران، 2010)، توپولوژی ارتباطی جهتدار (ژائو و همکاران، 2017) و هدایت مشارکتی فضا (شافرمن و همکاران، 2017). و ITCG نیاز به تعیین زمان حمله مناسب قبل از هدایت دارد (هو و همکاران، 2018).
5. نتیجه گیری ها
در این مقاله، یک روش کنترل همسویی چندین موشک پیشنهاد می شود، و یک کنترل کننده مقاوم شاخص عملکرد L_2/L_∞ را برای هدف ضد تداخل طراحی می کند. طراحی کنترل کننده نسبتا واضح است. فرایند راه حل ساده است، و سود کنترل کننده را می توان به صورت مستقیم توسط کامپیوتر حل کرد، که برای استفاده سیستم کنترل پرواز موشک مناسب است. این روش را به راحتی می توان با سایر روش های کنترلی دیگر ترکیب کرد که پتانسیلی برای استفاده در موقعیت واقعی میدان نبرد دارد.
Abstract
The problem of cooperative attack of multiple missiles is studied in this paper, and these missiles are supposed to suffer from external disturbances, communication delay. A kinematics model of the multi-missile under the situation of external disturbances and communication delay is firstly developed. And then based on the topology of directed graph, the problem of multi-missile convergence is transformed into the stability analysis of a closed-loop control system. A state feedback robust controller is designed by linear matrix inequality. Finally, a numerical simulation is given to demonstrate the effectiveness of the proposed control strategy.
1. INTRODUCTION
With the development of Anti-Aircraft Missile Systems (AAMS) and Close-In Weapon System (CIWS) in the world, it is becoming more and more difficult for a single missile to breakthrough defense(Lyu etal, 2019). Missile cooperation provide a new way of combat for modern warfare. Missile cooperation can share mulitiple missles information with each other to get the tactical coordination after launch, and finish the mission as formation group. In this case, the possibility of breaking through defenses and the capability of successfully striking against enemy targets will get a considerable enhancement.
This paper focused on cooperative attack of multiple missiles under cooperative control. This is more difficult than one missile launched from different positions at the same time and aimed at a common enemy target. It is an effective way to improve the probability of completing the task. convergence attack is mainly divided into two ways: one is guidance using cooperative control, and the other is impact time control guidance (ITCG). The cooperative control requires online data connection between missiles, and synchronizes the arrival time by communicating with each other and adjusting their own flight status. cooperative control has been widely studied and can be devided into three aspects: time cooperative guidance (Jeon etal, 2010), directional communication topology (Zhao etal, 2017) and space cooperative guidance (Shaferman etal, 2017). And the ITCG requires the determination of a suitable attacking time before guidance (Hu etal, 2018).
5. CONCLUSIONS
In this paper, a multiple missiles convergence control method is proposed, and a rubust controller meet the performance index ??�/??∞ for the purpose of anti-interference is designed. The design of the controller is relatively clear. The solution process is simple, and the gain of the controller can be solved directly by computer, which is convenient to be applied to the flight control system of the missile. The method can be easily combined with other control methods, has potential for use in actual battlefield situation
(جهت بزرگ نمایی روی عکس کلیک نمایید)
چکیده
1. مقدمه
2. مدلسازی موشک و توصیف مسئله
2.1. مدل موشکی با تاخیر و اختلالات
2.2. توصیف مسئله همسویی
4. نتایج شبیه سازی
4.1. محاسبه عددی کنترل کننده
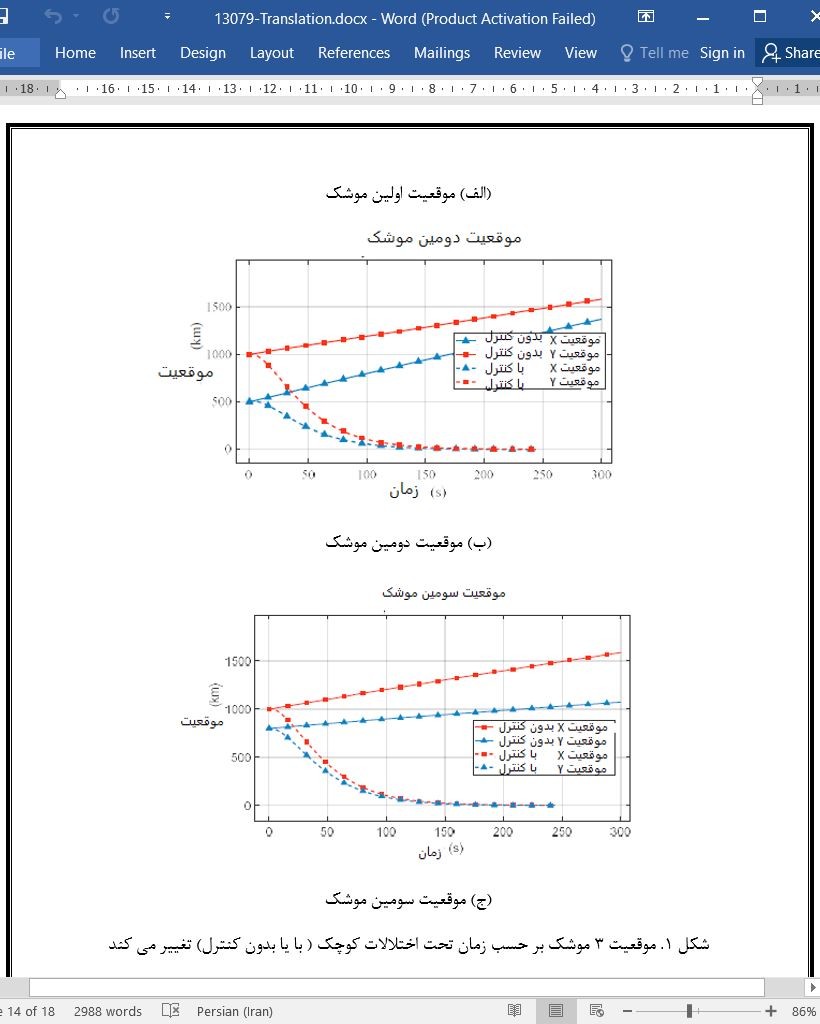
4.2. شبیه سازی مسیر پرواز تحت اختلالات کوچک
4.3. شبیه سازی مسیر پرواز تحت اختلالات بزرگ
5. نتیجه گیری ها
منابع
Abstract
1. INTRODUCTION
2. MISSILE MODELING AND PROBLEM DESCRIPTION
2.1 Missile model with delay and disturbances
2.2 Convergence problem description
4. SIMULATION RESULTS
4.1 Numerical calculation of controller
4.2 Flight trajectory simulation under small disturbances
4.3 Flight trajectory simulation under large disturbances
5. CONCLUSIONS
REFERENCES
این محصول شامل پاورپوینت ترجمه نیز می باشد که پس از خرید قابل دانلود می باشد. پاورپوینت این مقاله حاوی 28 اسلاید و 4 فصل است. در صورت نیاز به ارائه مقاله در کنفرانس یا سمینار می توان از این فایل پاورپوینت استفاده کرد.
در این محصول، به همراه ترجمه کامل متن، یک فایل ورد ترجمه خلاصه نیز ارائه شده است. متن فارسی این مقاله در 9 صفحه (1500 کلمه) خلاصه شده و در داخل بسته قرار گرفته است.
علاوه بر ترجمه مقاله، یک فایل ورد نیز به این محصول اضافه شده است که در آن متن به صورت یک پاراگراف انگلیسی و یک پاراگراف فارسی درج شده است که باعث می شود به راحتی قادر به تشخیص ترجمه هر بخش از مقاله و مطالعه آن باشید. این فایل برای یادگیری و مطالعه همزمان متن انگلیسی و فارسی بسیار مفید می باشد.
بخش مهم دیگری از این محصول لغت نامه یا اصطلاحات تخصصی می باشد که در آن تعداد 30 عبارت و اصطلاح تخصصی استفاده شده در این مقاله در یک فایل اکسل جمع آوری شده است. در این فایل اصطلاحات انگلیسی (تک کلمه ای یا چند کلمه ای) در یک ستون و ترجمه آنها در ستون دیگر درج شده است که در صورت نیاز می توان به راحتی از این عبارات استفاده کرد.
- ترجمه فارسی مقاله با فرمت ورد (word) با قابلیت ویرایش و pdf بدون آرم سایت ای ترجمه
- پاورپوینت فارسی با فرمت pptx
- خلاصه فارسی با فرمت ورد (word)
- متن پاراگراف به پاراگراف انگلیسی و فارسی با فرمت ورد (word)
- اصطلاحات تخصصی با فرمت اکسل