دانلود رایگان مقاله تشخیص سرعت وسیله نقلیه با استفاده از پردازش تصویر
چکیده :
مسئله ترافیک در حومه شهری به عنوان سیستم های نطارت بر ترافیک در دهه های گذشته که مبتنی بر پردازش ویدئویی است افزایش یافته است. این سیستم ها برای نظارت و مدیریت ترافیک بسیار مفید است و این نظارت و مدیریت عبارتند از مدیریت ترافیک، پیشگیری از تصادفات و همچنین حمل و نقل امن است. بنابراین تشخیص سرعت خودرو یک وطیفه چالش بر انگیز است. تشخیص سرعت خودرو و ردیابی خودرو از مراحل کلیدی این تحقیق است. در این تحقیق تشخیص سرعت خودرو در پردازش تصویر در نرم افزار متلب پیاده سازی می شود. در این تحقیق، روش ارائه شده متشکل از سه مرحله تفریق پس زمینه، استخراج ویژگی و ردیابی خودرو است. سرعت با استفاده از فاصله های خودرو که تعداد بیشتری فریم دارد تعیین می شود.
1.مقدمه
امروزه برای سیستم نظارت بر ترافیک تقاضایی وجود دارد. سیستم نظارت بر ترافیک اطلاعاتی در مورد پارامترهای تراکم ترافیک، سرعت خودرو و غیره است. اصلی ترین علت تصادفات جاده ای سرعت بیش از حد خودرو است. بسیاری از ابزار تشخیص سرعت وسایل نقلیه در حال حرکت برای زمینه های پردازش تصویر در دسترس هستند و برای سیستم های نظارت تصویری مورد استفاده قرار می گیرد. بنابراین، ویدئوها برای مثال در ردیابی اجسام در حال حرکت، پیدا کردن شدت ترافیک یا برآورد سرعت وسیله نقلیه و غیره استفاده می شود. ردیابی حرکت شیء راه مفیدی برای استخراج اشیاء از صحنه پس زمینه است که به طور گسترده برنامه های کاربردی ناوبری مستقل و تجزیه و تحلیل صحنه پویا استفاده می شود. تجزیه و تحلیل حرکت از صحنه ردیابی ترافیک می تواند در بسیاری از زمینه ها از قبیل کنترل کننده های ترافیک حمل و نقل استفاده باشد.
به طور سنتی سیستم های رادار برای بیشتر برنامه های کاربردی مورد استفاده قرار می گیرد. بنابراین فقط در برنامه-های نظامی نمی تواند اجرا شود اما در برنامه های شخصی قابل اجرا است. سیستم های رادار قادر به مشهور شدن در سیستم نظارت ترافیک با توجه به هزینه های بالا در رادار و با دقت کم نیست. این سیستم رادار نیاز به یک خط اتصال دید بین وسیله نقلیه و تجهیزات رادار دارد. روش دیگر برای محاسبه سرعت استفاده از حلقه القایی است. اما نیاز به یک تعمیر و نگهداری با هزینه بالا نصب و راه اندازی دارد، و نیز اطلاعات کافی در مورد پارامترهای ترافیک به ما ارائه نمی دهد.
بنابراین محدودیت هایی در روش های موجود وجود دارد و با استفاده از تکنیک تشخیص سرعت خودرو با استفاده از پردازش تصویر توسعه یافته است. اما عوامل احتمالی از جمله تغییرات روشنایی، تکان دادن درخت، و نویزهای دوربین ممکن است در خروجی الگوریتم پردازش تصویر اثر بگذارد. بنابراین تشخیص و اندازه گیری سرعت خودرو با استفاده از تکنیک پردازش تصویر انجام شده است. برآورد سرعت حرکت خودرو با استفاده از معادله ]1[ با طرح کروی مشتق شده است. الگوریتم لوکاس-کنده-توماس برای ردیابی حرکت خودرو مورد استفاده قرار می گیرد و در ]2[ بررسی می شود. این مقاله مبتنی بر تفریق پس زمینه است. درتفریق پس زمینه مدل سازی پس زمینه بسیار مهم می باشد. روش های مختلف تشخیص سرعت حرکت وسایل نقلیه شامل حلقه القاء، تفنگ رادار، تفنگی لیزری است ]3[. روش های استخراج پس زمینه تصاویر رنگی ]4[ مبتنی بر مقادیر میانگین، فیلتر میانی است. همچنین میانگین الگوریتم میانی و ترکیب گاوسی در حال اجرا توسعه یافته اند و مبتنی بر روس DCT است ]5[. در مرحله اول فریم-های مختلف برای تفریق پس زمینه مورد استفاده قرار می گیرد. به منظور حذف انتخاب های اشتباه توسط اتومبیل، هنگامی که از خط دیگر اتومبیل در حال عبور است یا حرکات کوچک دیگر مانند تکان خوردن درختان می توان از استخراج ROI استفاده کرد ]6[. پس زمینه با ماسک roi ضرب می شود. بنابراین خودرو به دقت تشخیص می دهد. عملیات آستانه و مورفولوژی برای کاهش نویزها مورد استفاده قرار می گیرد. در آستانه گذاری انتخاب مقادیر آستانه مبتنی بر روش های متفاوتی است. مقادیر آستانه می تواند به صورت دستی یا به صورت خودکار با استفاده از آستانه-گذاری انتخاب شود. هیستوگرام آستانه گذاری در ]7[ توضیح داده شده است.
2.روش پیشنهادی
این روش برای محاسبه سرعت خودرو است که در آینده به سمت دوربین هایی می رود که از دنباله ای از تصاویر با ردیابی حرکت وسیله نقلیه استفاده می کند. سیستم پیشنهادی به طور عمده در شکل 1 ارائه شده است. در مرحله اول، ویدئو به فریم تبدیل می شود. تفریق پس زمینه برای تشخیص خودرو استفاده می شود. به طور متوسط تمام فریم ها، پس زمینه را بدون حرکت شیء استخراج می کند. خروجی تفریق پس زمینه برای عملیات مورفولوژیکی و آستانه گذاری استفاده می شود. روش های جزئیات اتصال یافته برای تشخیص شیء و مرکز شیء مورد استفاده قرار می گیرد. که تعداد مرکز شیء بیش از فریم های متعدد ردیابی است. این سیستم برای نظارت بر پارامتر ترافیک بسیار مفید است. شکل 1 بلوک دیاگرام این روش را نشان می دهد.
الف) پیش پردازش
ویدئو با استفاده از دوربین همراه پیکسل ثبت می شود. در پیش پردازش ویدئو به فریم تبدیل می شود. پارامترهای مختلف از جمله تعداد فریم ها و نرخ فریم، فرمت رنگ، اندازه فریم استخراج می شود. در این ویدئو 372 فریم وجود دارد. نرخ فریم 30 فریم در ثانیه است. اندازه فریم 480*640 پیکسل است. همچنین در این مرحله فریم ها به دو برابر فرمت داده ها تبدیل می شود و برای عملیات آینده مورد نیاز است.
ب) حرکت تشخیص خودرو
تشخیص حرکت خودرو با استفاده از ویدئو یک کار چالش برانگیز است. برای تشخیص شیء در حال حرکت روش-های مختلفی مانند روش تفاضل زمانی، الگوریتم جریان نوری، الگوریتم تفریق پس زمینه وجود دارد. روش تفاضل زمانی با استفاده از دو فریم مجاور تصاویر پس زمینه را به دست می آورد. این روش دارای یک نقطه ضعف می باشد و آن این است که نمی تواند تغییرات تدریجی را به دقت تشخیص دهد. الگوریتم جریان نوری شیء را به صورت مستقل با استفاده از حرکت دوربین تشخیص می دهد. الگوریتم جریان نوری محاسبات پیچیده ای دارد و برای استفاده در زمان واقعی مناسب نیست. در تفریق پس زمینه اختلاف مطلق بین مدل پس زمینه و هر قاب به صورت لحظه ای برای تشخیص شیء در حال حرکت در نظر گرفته شده است. مدل پس زمینه تصویری است که با شیء حرکت نمی کند. در این روش، از الگوریتم پس زمینه برای تشخیص حرکت خودرو استفاده شده است. الگوریتم پس-زمینه به طور عمده از سه مرحله استخراج پس زمینه، آستانه، عملیات مورفولوژی تشکیل شده است.
1) استخراج پس زمینه
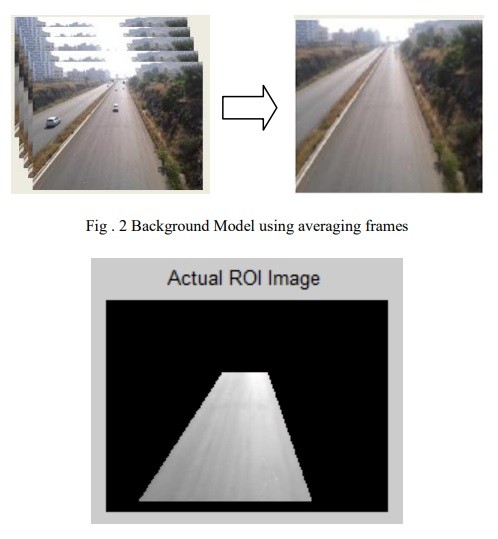
قلب تفریق پس زمینه استخراج پس زمینه است. زمانی که ویدئویی در بزرگراه تخلفات را ضبط می کند برای دوربین بسیار دشوار است که از هر گونه وسیله نقلیه در حال حرکت تصویر بگیرد. برای گرفتن تصویر از روش استخراج پس زمینه و یا مدل پس زمینه استفاده می شود. در این روش، به طور متوسط تمام مقادیر پیکسل به عنوان نتیجه در شکل 2 نشان داده شده است. ما فقط تصویر یک شیء ساکن را گرفتیم.
Abstract
As the traffic problems in urban areas are going to increase traffic surveillance systems based on video are attracted over past decades. These systems are very much useful to monitor and manage various traffic conditions such as traffic management, prevention of accident, also secure transportation .Within this vehicle speed determination on the road is one of the aim. So the vehicle speed determination is become challenging task. In speed determination vehicle detection and vehicle tracking are the key steps. To overcome disadvantages of traditional method here vehicle speed determination using image processing is done in MATLAB. In this paper, the proposed method consists of mainly three steps background subtraction, feature extraction and vehicle tracking. The speed is determined using distance travelled by vehicle over number of frames and frame rate.
I. INTRODUCTION
Nowadays there is more demand for traffic surveillance system. The traffic surveillance system gives the information about various traffic parameters such as vehicle count, traffic congestion, vehicle speed etc. As the single biggest cause of road accidents is speed most of the research is going on to detect speed of vehicle. Many speed detection instruments are available for moving vehicle speed detection Also the field of image processing is widely used for various applications generally in video surveillance systems. So, video sequences are in use for instance tracking moving objects, extracting trajectories, finding traffic intensity or estimating vehicle velocity etc. Using video to track vehicle in a scene reveals added information difficult to obtain using loop detectors. This system might be useful for extending in real-time surveillance.
Traditionally radar systems were used for many applications. So it can be applicable not only in military applications but also in civilian applications. The radar system is not able to become popular in traffic surveillance system due to high cost of radar and less accuracy. Also it requires line of sight connection between vehicle and radar equipment. The other method for speed calculation is use of inductive loops. But this requires high maintenance and installation cost, also it doesn’t provide enough information about traffic parameters.
So to overcome the limitations in existing methods, various techniques have been developed for vehicle speed determination using image processing. But the contingent factors such as illumination changes, tree waving, camera noise may affect the output of algorithm which is used in image processing. So for vehicle detection and speed measurement using image processing there are many work have been done. Some of these are reviewed here. The motion is derive in [1] using equation of spherical projection to estimate the vehicle speed. Lucas-Kanade-Tomasi algorithm is used for motion tracking. The various algorithms which are developed for vehicle detection and tracking has reviewed in [2].This paper is based on background subtraction. In background subtraction background modelling is most important. The various methods of moving vehicle speed detection are Inductive loops, RADAR gun, LASER Gun, Manual count [3]. The methods of background extraction from colour image [4] based on average value, median filter and common region. Also running average, median algorithm, Mixture of Gaussian [5] are developed, these are based on DCT. Many times first frame or frame differencing is used for background subtraction. To remove misdetection of vehicle[6] due to vehicle travelling from other lane, or other small movements such as tree waving can be avoided using ROI extraction. The background is multiplied with roi mask. So that vehicles are detected accurately. Furthermore thresholding and morphological operations are used to reduce noise. In thresholding selection of threshold value is based on various methods. The threshold value can be selected manually or automatically by using thresholding. The histogram thresholding is explained in [7].
II. PROPOSED METHOD
This method is used for estimating vehicle speed which is coming towards camera by tracking the motion of vehicle through sequence of images. The proposed system mainly consists of steps as shown in fig.1 Firstly, the video is converted into frames. The Background Subtraction is used for moving vehicle detection. Averaging all frames, background without moving object is extracted. Background Subtraction output is applied for Thresholding and Morphological Operation. Connected Component Method is used to detect object and centroid of that object. Centroid is tracked over multiple frames. Velocity is calculated using distance travelled by vehicle and frame rate of video. This system is helpful for traffic parameter surveillance. Fig. 1 shows Block Diagram for proposed method.
A. Pre-processing
The video is recorded using mobile camera having pixels. In pre-processing the video has converted into the frames. The various parameters such as number of frames, frame rate, colour format, frame size are extracted. There are total 372 frames in this video. It has frame rate 30 frames per second. The frame size is of 640x480 pixels. Also at this stage the frames are converted into double data format i.e. required for future operation.
B. Moving Vehicle Detection
Detecting Moving vehicle from video accurately is challenging task. To detect moving object there are various approaches such as temporal differencing method, optical flow algorithm, background subtraction algorithm. Temporal differencing method uses two adjacent frames only to get background image. This method has one disadvantage that it cannot detect slow changes accurately. Optical flow algorithm detects object independently using camera motion. Optical flow algorithm is computationally complex and it is not suitable for real time application. In background subtraction absolute difference between background model and each instantaneous frame is taken to detect moving object. Background model is an image with no moving object.In this work, background subtraction algorithm is used to detect moving vehicle. The background subtraction algorithm mainly consist of three stages Background Extraction, Thresholding, Morphological Operations.
1) Background Extraction:
The heart of Background Subtraction is background extraction. While recording video on highway; it is very difficult to get the image without any moving vehicle. For getting such image which is called as background or background model background extraction is used. In this work, average of all frames pixel values, have taken because of this as result as shown in Fig. 2, we got the image having only stationary object.
چکیده :
1. مقدمه :
2. روش پیشنهادی
الف) پیش پردازش
ب) حرکت تشخیص خودرو
1) استخراج پس زمینه
2) آستانه گذاری
3) عملیات مورفولوژیکی:
ج) استخراج ویژگی ها:
د) ردیابی خودرو:
ه) تشخیص سرعت
3. نتایج:
Abstract
I.Introduction
II.Vehicle Speed Determination Method
A. Pre-processing
B. Moving Vehicle Detection
1) Background Extraction:
2) Thresholding:
3) Morphological Operations:
C. Feature Extraction
D. Vehicle Tracking
E. Speed Determination
III.Experimental Results and Discussions
IV.Conclusion