دانلود رایگان مقاله اندازه گیری سیستم سرعت وسیله نقلیه با استفاده از پردازش تصویر
چکیده:
این پژوهش یک سیستم اندازه گیری سرعت خودرو را با استفاده از پردازش تصویر ارائه می دهد. به طور کلی، تصویر گرفته شده از تشخیص سرعت وسیله نقلیه در شرایط تاریک با عملکرد بالا و با دوربین گران مورد نیاز است. با این حال، این سیستم نیاز به یک دوربین ارزان مانند دوربین های دیجیتال و یا دوربین های نصب شده بر روی گوشی های هوشمند دارد. در نتیجه، این سیستم از سرعت تفنگ استفاده می کند. کنترل سرعت شاتر دوربین، یک لاین روشن است که از پشت چراغ پیشانی یک وسیله نقلیه در حال حرکت می آید و در جلوی تصویر ظاهر می شود. علاوه بر این، تصویر گرفته شده از شیب، سرعت وسیله نقلیه را اندازه گیری می کند. در این روش، ما الگوریتمی که به این ویژگی وابسته است توسعه می دهیم. نتیجه حاصل از این آزمایش در اندازه گیری مقادیر منطقی نشان داده شده است.
1.مقدمه:
از آنجا که امکانات حمل و نقل توسعه یافته است، ترافیک تصادف به یک مشکل جدی تبدیل شده است. به منظور حل این مشکل، از یک دستگاه کنترل نقض که سرعت اتوماتیک دارد در جاده ها استفاده می شود. این سیستم در ژاپن ORBIS نام دارد. از این سیستم به عنوان سیستم سیم پیچ حلقه مبتنی بر سیستم رادار استفاده می شود. با این حال، این روش دارای یک نقطه ضعف است و آن این است که برخی از اشیاء را با اشتباه تشخیص می دهد. در شهرستان ژاپن حدود نیمی از دستگاه ها نقض دارند. علاوه بر این، این سیستم ها نیاز به تعمیراتی با هزینه بالا دارند. با استفاده از رادار می توان سرعت دستگاه را اندازه گیری کرد. با این حال، استفاده از این دستگاه بدون دانش تخصصی دشوار است.
اخیرا، پردازش تصویر مبتنی بر تکنیک های اندازه گیری سرعت وسیله نقلیه به طور جدی توسعه یافته اند. به عنوان مثال، زمانی که سرعت اندازه گیری دارای چند خطا است ، پردازش تصویر می تواند به تجزیه و تحلیل علت خطا کمک کند. اما پردازش تصویر مبتنی بر سیستم اندازه گیری سرعت دارای مشکلاتی است. به ویژه در شرایط تاریک، تصاویر نمی توانند به وضوح گرفته شوند و در نتیجه دقت اندازه گیری آن کم است.
به طور کلی ما تلاش می کنیم تا یک سیستم اندازه گیری سرعت خودرو را با دوربین توسعه دهیم. همانطور که در بالا توضیح داده شد، گرفتن یک واضح تصویر در شرایط تاریک با مشخصات پایین غیر ممکن است. بر این اساس، ما از چراغ جلو خودرو در حال حرکت استفاده می کنیم. اول این که، این سیستم با استفاده از دوربین یک تصویر از خودروی در حال حرکت می گیرد و توسط شاتر دوربین آن را تنظیم می کند. شاتر دوربین وابسته به محیط است به این دلیل که دوربین ثابت و خودرو در حال حرکت است، چراغ جلو وسیاه نقلیه در تصویر مشاهده می-شود. دوم این که، خط روشن تصویر استخراج شده است. ما پس از تغییر و تحول در سیستم طول واقعی خط نوری را محاسبه می کنیم. ما می توانیم سرعت طول واقعی خودرو و سرعت شاتر را محاسبه کنیم. به طور کلی ما به یک دوربین دیجیتال یا دوربین نصب شده بر روی گوشی های هوشمند نیازمندیم. هزینه عملکرد سیستم می-تواند کم باشد.
2.تئوری سیستم
2.1 سیستم اندازه گیری:
فرآیند سیستم اندازه گیری در شرایط تاریک عبارتند از:
1) نصب دوربین بالای جاده ها
2) فاصله اندازه گیری مناطق نوری
3) تنظیم سرعت شاتر
4) اطلاعات ورودی مناطق اندازه گیری
5) گرفتن تصویر از وسایل نقلیه در حال حرکت
6) استخراج خط نوری تصویر
7) محاسبه سرعت وسیله نقلیه توسط خط طولی و سرعت شاتر
ساختار این سیستم در شکل 1 و 2 نشان داده شده است. برای اولین بار منطقه نوری به صورت دستی محاسبه می شود. به عنوان مثال، مناطق نوری در شکل 2 نشان داده شده است. قبل از گرفتن تصویر از وسایل نقلیه، اطلاعات فاصله در مورد مناطق نوری ضروری است.
2.2روش محاسبه و استخراج:
در این پژوهش، ما توابع تصمیم گیری آستانه را به صورا خودکار توسعه دادیم. فرآیند استخراج خط نوری عبارتند از:
گام 1) تصویر ورودی
گام 2) محاسبه هیستوگرام میانگین وزنی
گام 3) آستانه تصمیم گیری
گام 4) فرآیند ماسک های آستانه
گام 5) تبدیل تصویری
گام 6) پردازش برچسبی
گام 7) محاسبه فاصله واقعی خط نور
اول این که، آستانه تصمیم گیری ضروری است. برخی از مناطق نوری تصویر را می توان با این آستانه استخراج کرد. این مناطق نوری شامل خط نوری است. در فرآیند بعدی انجام فرآیند تبدیل تصویری در منطقه ضروری است. در نهایت، برای حذف خط نوری از این مناطق، فرآیند برچسب زدن را انجام می دهیم. در این بخش، ما در مورد فرآیند شکل 2 توضیح خواهیم داد.
الف) محاسبه هیستوگرام تصویر و هیستوگرام میانگین وزنی
هیستوگرام تصویر محاسبه شده است. آستانه تصمیم گیری به صورت خودکار با هیستوگرام BGR در شکل 3 نشان داده شده است. با این حال، مقادیر هیستوگرام در منطقه برای مقادیر آستانه تصمیم گیری بسیار دشوار است. برای حل این مشکل، متوسط وزن هیستوگرام را محاسبه می کنیم. از تابع وزن گاوسی برای به دست آوردن هیستوگرام استفاده می شود. شکل 4 نتیجه هیستوگرام وزن گاوسی را نشان می دهد.
ب) تصمیم گیری آستانه
در مرحله بعد، برای تجزیه تغییرات هیستوگرام، با استفاده از پردازش دیفرانسیل وزن هیستوگرام را به دست می-آوریم. منظور این است که ما حداکثر شیب هیستوگرام را به دست آوریم. این شیب با نقطه A تعریف می شود.
همانطور که ما می دانیم، خط نوری دارای مقادیر روشنایی بالاتر از منطقه دیگر تصویر است. بنابراین، ما هیستوگرام وزن گاوسی را از نقطه A به سمت چپ شناسایی و تغییر مقادیر منطقه دیفرانسیل کوچک را بررسی می کنیم. سپس مقادیر روشنایی را به عنوان یک مقدار آستانه تصمیم گیری قرار می دهیم.
Abstract
This research proposes a new vehicle speed measuring system based on image processing technique. Generally, in order to detect the vehicle from image taken in dark circumstance, expensive high-performance camera is needed. However, this system needs only a cheap general camera, like digital camera or the camera mounted on smartphones. Thereby, this system uses as speed gun. By controlling the shutter speed of camera, a bright line which comes from the headlamp of a moving vehicle is appeared in the picture. Moreover, from even the image taken from the slant, the vehicle speed can be measured with a process of projective transformation. In this work, we developed an algorithm depend on this feature. Experiment result shows a reasonable measuring value.
1. Introduction
Since the transport facilities were developed, traffic accident have become serious problem(1) . In order to solve these problems, an automatic speed violation control device has been applied on the road. This system is called ORBIS in Japan. This system use loop coil or radar-based system. However, these method has a drawback that misdetection occurs in some certain situations. As other problem, in some city of Japan, about half of devises are fault.
Moreover, fault devises have been leaving without repair(2) because these system require high deployment costs and maintenance cost. Speed gun is a device to measure the speed. This device uses the radar-based method. However, it is difficult to use this device without some expert knowledge.
In this situation, recently, image processing based vehicle speed measuring techniques are developed actively. Image processing give some advantage. For example, when measurement speed have few error, image processing can helps the analysis of the cause of the error. But image processing based speed measuring system also have problems. Especially for a dark circumstance, the pictures cannot be taken clearly and the measuring accuracy becomes low.
We attempted the development of a new vehicle speed measurement system with general camera. As described above, it is impossible to take a clear and a sharp picture with the low profile camera in the dark circumstance. Accordingly, our system uses the headlight of moving vehicle. First, this system take a picture of the moving vehicle by the setting the shutter speed. The shutter speed depend of environment. Because the camera is fixed and the vehicle is moving, the headlight of vehicle observed in the picture becomes a light line. Next, this light line is extracted from the picture. Our system performed a projective transformation against optional area of road in order to calculate the real length of the light line. Then, a distance of this optional area must be known. We can obtain the vehicle speed by this real length and shutter speed. What we need is only the general camera like digital camera or the camera mounted smartphone. Such a construction can yield a low cost system. Moreover, this system can substituted for speed gun.
2. System and Theory
2.1 Measurement System
The process of a measurement system for dark circumstance is as follows:
1) Install the camera above a road
2) Measure a distance of an optional area.
3) Set the shutter speed
4) Input the information of measurement area
5) Take the moving vehicle
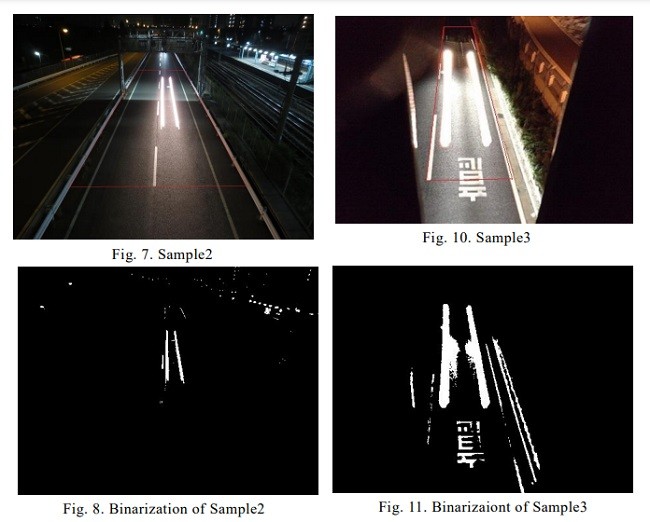
6) Extract the light line from picture
7) Calculate the vehicle speed by length of line and shutter speed
The system structure is Fig. 1. Figure. 2 is example. The optional area is first decided manually. For example, the optional area is show in Fig. 2. Before taking the vehicle, the distance information of the optional area is necessary.
2.2 Method of extraction and calculation
In this research, we developed automatic threshold decision function. The processing of light line extraction is as follows:
step.1 Input of the image
step.2 Calculation of a weighted average histogram
step.3 Decision of the threshold
step.4 Mask process by the threshold
step.5 Projective transformation
step.6 Labeling processing
step.7 Calculation of the real distance of the light line
First, decision of threshold is necessary. Some light areas can be extracted from the image with this threshold. These light areas include the light line. Next process is to perform projective transformation from the optional area. Finally, for picking up the light line from these areas, the process is labeling process. In this section, we explain about these process with sample1 in Fig.2.
(a) Calculate a histogram of the image and its weighted average histogram
A histogram is calculated from the picture. Automatic threshold decision with the BGR histogram shown in Fig. 3 is necessary. However because histogram values are hanging violently in local area, it is difficult to decide a threshold value. To solve this problem, weight average histogram is calculated. A Gaussian distributed weight function is utilized to get a smoothed histogram(3,4) . Figure. 4 is shows the result of Gaussian weighted histogram of Fig. 3.
(b) Threshold decision
Next, for analyzing the change of histogram, differential processing is performed to weighted histogram. This means the maximum slope of the histogram is found, and we use this slope value. This maximum slope is defined as Point A.
As we known, the light line has a higher brightness value than other area of the picture. Therefore, we inspect the Gaussian weighted histogram from Point A to the left side and detect an area where the change of differential value become small. Then decide the luminance value there as a threshold value.
چکیده
1. مقدمه:
2. تئوری سیستم
2.1 سیستم اندازه گیری:
2.2 روش محاسبه و استخراج:
الف) محاسبه هیستوگرام تصویر و هیستوگرام میانگین وزنی
ب) تصمیم گیری آستانه
ج) تبدیل تصویری
3. شبیه سازی:
4. نتایج:
Abstract
1. Introduction
2. System and Theory
2.1 Measurement System
2.2 Method of extraction and calculation
(a) Calculate a histogram of the image and its
weighted average histogram
(b) Threshold decision
(c) Projective transformation
3. Simulation
4. Conclusions
References