
دانلود رایگان مقاله تأثیر بالقوه ارتباط وسیله نقلیه درباره جاهای پارک در خیابان
چکیده
هدف این مقاله مطالعه تأثیر تأمین اطلاعات صعودی درباره جاهای پارک در خیابان بر پویایی پارکینگ تحت شرایط ناهمگون است. با استفاده از نمونه شبیهسازی بر اساس عامل هوشمند، عملکرد استراتژی ارتباط صعودی وسیله نقلیه با وسیله نقلیه و استراتژیای که حسگرهای پارکینگ و ارتباط وسیله نقلیه با وسیله نقلیه ترکیبشدهاند باهم مقایسه شده است درروش دوم فضاهای پارک در خیابان تمامی با حسگرهایی که قابلیت انتشار وضعیتشان رادارند مجهز شدهاند.
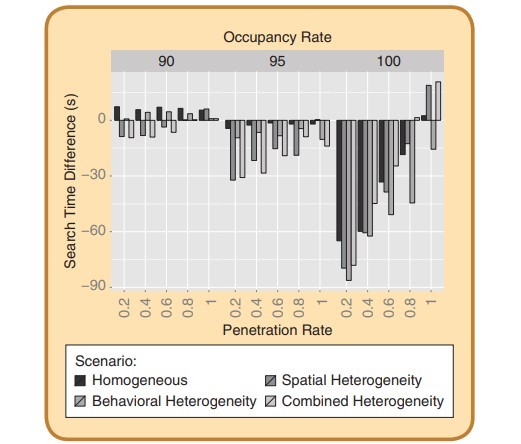
نتایج نشان میدهد که زمان جستجو برای اتومبیلهایی که "هوشمند" هستند کاهشیافته، بهویژه در شرایط فضای ناهمگون و برای استراتژی حسگر بنیان. علاوه بر این در مورد استراتژی حسگر بنیان، نتایج نشان داد که اتومبیلهای هوشمند بهتر از اتومبیلهای معمولی در تمامی شرایط در مورد فاصله پیادهروی عمل کردند. آثار مثبت استراتژی وسیله نقلیه با وسیله نقلیه محدود به بهبود فاصله پیادهروی بود.
1. مقدمه
تأمین اطلاعات برای رانندگانی که در جستجوی جای خالی برای پارک کردن هستند منجر به کاهش گشت زنی برای پیدا کردن جای پارک و درنتیجه کاهش آلودگی هوا، تراکم ترافیک و سایر آثار منفی مربوط به ترافیک اتومبیل میشود [1] – [3]. باوجودی که شهرهای سرتاسر جهان فناوریهایی برای تأمین اطلاعات درباره امکانات پارکینگهای خارج از خیابان ارائه کردهاند. در عوض اطلاعاتی که مبنی بر وضعیت بود یا نبود فضای پارک در خیابان باشد تا روزهای اخیر وجود نداشته است. اگرچه این امر بهسرعت نیز در حال تغییر است چراکه تعداد زیادی از شرکتها برنامههایی وارد بازار کردهاند که چنین اطلاعاتی را در اختیار مردم میگذارند [4] – [6]. با استفاده از نفوذ گسترده گوشیهای هوشمند و وسایل مسیریابی موجود در اتومبیلها هماکنون این امکان وجود دارد که اطلاعات صحیحی در سطح فضاهای پارک شخصی را فراهم کرد.
این مقاله بر اساس یک پژوهش قدیمی که در آن آثار تأمین اطلاعات درباره پارک کردن در خیابان در یک موقعیت بسیار ویژه در مورد رفتار راننده و همچنین زمینهٔ فضایی که در آن راننده در جستجوی پارک بود، انجام میشود [7]. نتایج این تحقیق نشان داد که اطلاعات در مورد پارک کردن مزایای محدودی دارد هم برای رانندگانی که اطلاعات را دریافت میکنند و هم برای سایر رانندگان. اطلاعات بیشتر برای رانندگانی که فاصله پیادهروی آنها در شرایط اشغال خیلی بالابود مفید واقع شد. علاوه بر این نتایج کلی تنها زمانی بهتر شد که برای انتقال مداوم اطلاعات در مورد وضعیت اشغال فضای پارک از حسگرها استفاده شد. سؤال این است که آیا این نتایج ضدونقیض نیز در شرایط کمتر تخصیصی نیز به دست خواهند آمد. بنابراین در پژوهش کنونی ما به تحلیل تأثیر تأمین اطلاعات در شرایط واقعیتر پرداختیم. واضحتر بگوییم که ما به بررسی ناهمگونی در رفتار راننده از دیدگاه توزیع فضای پارک، تأثیر عرضه و تقاضای پارک و نیز تأثیر تأمین اطلاعات در مورد جاهای پارک در خیابان پرداختیم.
مقاله به ترتیب زیر سازماندهیشده است. در ادامه مقدمه به توصیف روشی که در آن رانندگان اتومبیلها از دسترس بو دن فضای خالی پارک در خیابان با استفاده از دو استراتژی ارتباطی مجزا آگاه میشوند ف میپردازیم (بخش دوم). در بخش سوم ما به معرفی ابزار عامل هوشمند خود که PARKAGENT نامیده میشود ونیز تنظیم شبیهسازی میپردازیم. در بخش چهارم نتایج شبیهسازی ارائه میشوند. و درنهایت در بخش پنجم نتیجه و مسیر پژوهشهای آینده را توضیح خواهیم داد.
2. تأمین اطلاعات صعودی
A. اطلاعات و پارک کردن
تأمین اطلاعات با توجه به نرخ اشغال زنده امکانات پرک کردن در خارج از خیابان، تمایلات رانندگان و نقش اطلاعات دریافتن این امکانات موردبررسی قرارگرفته و نمونهسازی شده است (برای مثال [8]). برخلاف امکانات پارک در خارج از خیابان، تحقیقات در مورد رفتار پارک و نقش اطلاعات در پارک در خیابان با استفاده از نمونه شبیهسازی کمتر موردبررسی قرارگرفته است [2]، [9]، [10]. علاوه بر این پژوهشهای واضح مکانی در مورد تأثیر اطلاعات و رفتار رانندگان زمانی که در جستجوی فضای پارک در خیابانها میگردند نادر هستند [11]، [12].
فناوریهای متعددی به تأمین اطلاعات در مورد فضاهای پارک در خیابان میپردازند. یک مورداستفاده از ارتباط وسیله نقلیه با وسیله نقلیه میباشد که به آن شبکههای ترابری موردی (VANETs) میگویند [13]، [14]. VANETs روشی برای اشتراکگذاری اطلاعات در میان نقاط اتصال شبکه با استفاده از پخش صعودی فراهم میکند.VANETS به د لیل خصوصیاتی که دارند برای زمینههای پارک کردن مناسب هستند. شبکه توسط عوامل هوشمند متحرک (در موردمطالعه ما، اتومبیل) شکلگرفته که قادر به ارسال و دریافت اطلاعات از طریق فناوری بیسیم هستند (برای مثال ارتباط طیف کوتاه اختصاصی،DSRC). تمامی عوامل هوشمند موجود در شبکه با این فناوری تجهیز شدهاند که از طریق جمعآوری اطلاعات و توزیع همین اطلاعات به عوامل هوشمند نزدیک در شبکه مشارکت دارند. به علت محدودیت دامنه فضایی این فناوری و همچنین ماهیت کوتاهمدت اطلاعات به چنین شبکههایی شبکه " موردی " گفته میشود. مورد دیگر استفاده از فناوری حسگر بنیان است. این نوع از شبکه بیسیم امکان درک رویداد یا تغییر در محیط را میدهد. به همین دلیل میتوان از آن در محیط شهری بهمنظور نظارت بر اشغال فضای پارک بهوسیله درک بود یا نبود وسیله نقلیه استفاده کرد. علاوه بر این حسگر قادر به ارسال اطلاعات جمعآوریشده به سایر حسگرهای دوروبر و اتومبیلهای هوشمند اطراف میباشد.
پژوهشهای اندکی درزمینهٔ مزایای این فناوری اطلاعات در مورد دامنه پارک کردن انجامشدهاند (بهمنظور مشاهده تحلیلهای اولیه به [15] و [19] مراجعه کنید). هیچیک از این پژوهشها بهطور نظاممند به بررسی آثار این فناوری بر پویایی پارک کردن در یک زمینهٔ فضایی واضح نپرداختهاند. زمینه فضایی بخصوص در دامنه پارک کردن از اهمیت بسزایی برخوردار است. تنها با شبیهسازی پویایی پارک کردن در سطح فضاهای پارک انفرادی است که ویژگیهای ضروری اساسی پویایی پارک کردن را میتوان کاملاً به دست آورد [20]. پیچیدگی نرمافزاری که ما از آن استفاده کردهایم (PARKAGENT) امکان شبیهسازی پیشرفته اساسی بیشتر فرایند پارک کردن را میدهد و نیز تأثیر تأمین اطلاعات را ممکن میسازد. پژوهش حاضر بر اساس تحقیق پیشین که در آن به بررسی نظاممند آثار تأمین اطلاعات در محیط هم گون پرداختیم انجامشده است [7]. در مقاله پیشین تأثیر استراتژی وسیله نقلیه با وسیله نقلیه (V2V) با استراتژی حسگر بنیان (S2V) مقایسه شد. در پژوهش فعلی ما مسیرهای این تحقیق را با بهکارگیری مشارکت ناهمگون هم از دیدگاه رفتار راننده و همچنین توزیع فضایی تقاضای پارک بسط دادهایم.
B. اجرای پروتکلهای ارتباطی
در این بخش از مقاله ما به توضیح انتقال اطلاعات بین وسایل نقلیه و حسگرهای پارکینگ و وسایل نقلیه خواهیم پرداخت. شایانذکر است که بگوییم در شبیهسازی بین اتومبیلهایی که قادر به برقراری ارتباط هستند (V2V) و اتومبیلهایی که این توانای آر ندارند تفاوت قائل هستیم. اتومبیلهای هوشمند قادر به دریافت و ارسال پیامها با دامنه انتقال حدود 200 متر میباشند (که ازنظر عملی فاصله انتقال مناسبی است حتی در شرایط غیر بهینه [21]). پیامها توسط اتومبیل ه ا و حسگرها در فواصل زمانی انتقال 5 ثانیه بهتمامی وسایل ناحیه ارسال میشود. در استراتژی ارتباطی V2V پیامها در دو موقعیت ساختهشده و منتقل میشوند. ابتدا زمانی که یک اتومبیل هوشمند یک جای پارک را ترک میکند برای سایر رانندگان پیامی مبنی بر اینکه جای پارک اشغالشده اکنون خالی است ارسال میکند. دوم اینکه زمانی که یک اتومبیل هوشمند جای پارک خای را اشغال میکند نیز پیامی مبنی بر اشغال شدن فضا ارسال میشود. تمامی اتومبیلهای هوشمندی که در شعاع 200 متری هستند هر دو نوع پیام را دریافت میکنند و درنتیجه آنها را به سایر اتومبیلها ارسال میکنند. اتومبیلهای دریافتکننده پیام میتوانند پیامهای دریافتی را به سایر اتومبیلها که در دامنه انتقالشان هستند توزیع کنند. بنابراین یک پیام میتواند ظرف چند تکرار در تمام شبکه پخش شود. باید خاطرنشان کنیم که فضاهای پارک خالی در ابتدای شبیهسازی و ترک اتومبیلها که قادر به برقراری ارتباط نیستند منجر به انتشار پیام در استراتژی ارتباطی V2V نشوند.
Abstract
The aim of this paper is to study the impacts of bottom-up information provision about on-street parking places on parking dynamics under heterogeneous conditions. Using an agent-based simulation model, performance is compared between a bottom-up vehicle-to-vehicle communication strategy and a strategy that combines parking sensors and vehicle-to-vehicle communication. In the latter approach onstreet parking places are all equipped with sensors capable of disseminating their status.
The results show that search time is decreased for informed ‘smart’ cars, especially under spatially heterogeneous conditions, for the sensor-based strategy. Furthermore, for the case of the sensor-based strategy, the results point out that smart cars outperform regular cars in terms of walking distance under all circumstances. The positive impacts for the vehicle-to-vehicle strategy are limited to walking distance improvements only.
I. Introduction
Provision of information to drivers in search for parking can reduce cruising for parking and thus reduce air pollution, traffic congestion and other negative externalities related to car traffic [1]–[3]. Hence, cities around the world have installed technologies to provide drivers with information about off-street parking facilities. In contrast, information on the occupancy status of onstreet parking places was non-existing until recently. This is however changing rapidly due to a number of start-up companies that have entered the market to provide such information [4]–[6]. By using the widespread penetration of smart phones and in-car navigation devices it is now possible to provide accurate information at the level of individual parking places.
The paper builds on an earlier study in which the impacts of information provision on on-street parking were studied for a highly stylized situation, in terms of driver behavior as well as the spatial setting within which drivers search for parking [7]. The results of this study showed that parking information has only limited benefits, both for the drivers receiving information and for other drivers. Information was mostly beneficial for drivers in terms of walking distance under conditions of very high occupancy rates. Furthermore, the overall result was only improved when sensors were used for continuous transmission of information on a parking place’s occupancy status. The question is whether these counter-intuitive results also hold under less stylized conditions. Therefore, in the current paper we analyze the impacts of information provision under more realistic conditions. More specifically, we explore how heterogeneity in terms of driver behavior and in terms of spatial distribution of parking demand and supply influence the effectiveness of information provision on onstreet parking places.
The paper is organized as follows. Following this introduction, we describe the way in which car drivers are informed about on-street parking place availability using two distinct communication strategies (Section 2). In Section 3, we describe our agent-based modeling tool called PARKAGENT, as well as the simulation set up. In Section 4, the results of the simulations are presented. This is followed by the conclusions and paths for future research (Section 5).
II. Bottom-Up Information Provision
A. Information and Parking
Information provision regarding live occupancy rates of offstreet parking facilities, driver preferences and the role of information in finding these facilities has been studied and modeled (e.g. [8]). In contrast to off-street facilities, research on parking behavior and the role of information on on-street parking using simulation models is studied less [2], [9], [10]. Furthermore, spatially explicit research on the impacts of information and behavior of drivers when searching for onstreet parking is scarce [11], [12].
Various technologies allow for provision of information on on-street parking places. One possibility is the use of vehicleto-vehicle communication using so-called Vehicular Ad-Hoc Networks (VANETs) [13], [14]. VANETs provide a way to share information among the nodes in a network using bottomup dissemination. Because of their attributes, VANETS are suitable for application in a parking context. The network is formed by mobile agents (in our case, vehicles) that are capable of sending and receiving data via wireless technologies (i.e. dedicated short-range communication, DSRC). All agents in the network equipped with this technology contribute to the network by gathering information and distributing this information to nearby agents. Because of the limited spatial range of this technology, as well as the short-term nature of the information, the networks are referred to as ‘ad-hoc’. Another possibility is the use of sensor-based technology. This kind of wireless technology allows for sensing events or changes in the environment. As such it can be used in an urban environment to monitor parking place occupancy by sensing the presence or absence of a vehicle. Additionally, the sensor is capable of sending the gathered information to other nearby sensors and nearby smart cars.
Few studies have explored the benefits of these information technologies for the domain of parking (see [15]–[19] for some first analyses). None of these studies has systematically explored the impact of these technologies on parking dynamics in a explicitly spatial context. The spatial context is especially important in the domain of parking. Only by simulating parking dynamics at the level of individual parking places, the inherent emergent properties of parking dynamics can be fully captured [20]. The sophistication of the software we have used (PARKAGENT) allows for a fundamentally more advanced simulation of the parking process and the impact of information provision. The current paper builds on a previous study in which we started to systematically study the impact of information provision in a homogeneous environment [7]. In that preceding paper, the impacts of a vehicle-to-vehicle strategy (V2V) were compared to a sensor-based strategy (S2V). In the current paper we extend this research strand by incorporating heterogeneity, both in terms of driver behavior as well as in the spatial distribution of demand for parking.
B. Implementation of Communication Protocols
In this subsection, we describe the way information is transmitted between vehicles and parking sensors and vehicles. Important to note is that in the simulations a distinction is made between cars that are able to communicate (V2V) and cars that cannot communicate. Smart cars are able to send and receive messages within a fixed transmission range of 200 meter (which has been shown to be a practically feasible transmission distance, even under non-optimal conditions [21]). Messages are broadcasted by cars and sensors to all entities in the vicinity at a transmission interval of 5 seconds. In the V2V communication strategy, messages are created and disseminated in two situations. First, when a smart car leaves a parking place it will send out a message stating the vacancy of the spot for other drivers. Second, a smart car will disseminate a message when it occupies an empty parking place. All smart cars that are driving around within a 200 meter radius will receive both kinds of messages and subsequently pass them on to other smart cars. The receiving cars are able to subsequently send the messages to other cars within their transmission range. A message can thus traverse the entire network in only a few iterations. It is important to note that vacant parking places at the start of the simulation and departures of cars that are not able to communicate will not lead to the dissemination of a message in case of a V2V communication strategy.
چکیده
1. مقدمه
2. تأمین اطلاعات صعودی
A. اطلاعات و پارک کردن
B. اجرای پروتکلهای ارتباطی
3. توصیف شبیهسازی
A. فضای ناهمگون
B. رفتار ناهمگون راننده
C. تنظیمات
D. متغیرهای وابسته
4. نتایج
A. نگاه اولیه به نتایج
B. جزئیات بیشتر استراتژی V2V
C. جزئیات بیشتر استراتژی S2V
5. نتیجه
منابع
Abstract
1. Introduction
2. Bottom-Up Information Provision
A. Information and Parking
B. Implementation of Communication Protocols
3. Simulation Description
A. Spatial Heterogeneity
B. Heterogeneous Driver Behavior
C. Settings
D. Dependent Variables
4. Results
A. Initial Look at the Results
B. V2V Strategy in More Detail
C. S2V Strategy in More Detail
5. Conclusions
References