
دانلود رایگان مقاله تجمیع فیلترهای تطبیقی تناسبی در آکوستیک
چکیده
طرحهای تطبیقی تناسبی ارائهشدهاند تا از کمپشتی بهر برده شده و به همگرائی فیلتر در حذف پژواک آکوستیک سرعت بخشیده شود. اخیراً، تجمیع فیلترهای تطبیقی گسترش دادهشدهاند تا با طرحهای تناسبی فعالیت کنند. این کار برای رسیدن به عملیاتی مقاوم درزمانی است که سطح واقعی ارائهشدهاند در راهحل بهینه مشخص باشد. علاوه بر این، بهرهبرداری از توزیع نامتقارن انرژی تطبیقی در طرحهای تناسبی برای کاهش اشتباه تنظیم در فضای حالت کلی امکانپذیر است. در این مقاله، توضیح میدهیم که این ساختارهای فیلترهای تطبیقی جدید، که اصولاً برای حذف پژواک ارائهشده و مورد آزمون قرارگرفتهاند، چگونه میتوانند به صورتی مؤثر برای بهبود مصالحه عملکرد معمول بسط داده شوند. لازم به ذکر است که این مصالحه عملکرد معمول بهوسیله ارائه چندین تغییر کوچک در سناریوهای کنترل فعال نویز ظاهر میشوند. نتایج تجربی در سناریوهای واقعی نشان میدهند که طرحهای ارائهشده باعث تأمین جایگزینهایی جالب برای استفاده سنتی از تک فیلتر تطبیقی میشوند.
1.دیباچه
کنترل فعال نویز (ANC) حوزهای موردتوجه است که روشهای پردازش سیگنال دیجیتال را با آکوستیکهای سنتی تجمیع میکند. استفاده از الگوریتمهای تطبیقی برای ANC از دهه 1980 به صورتی پیوسته موردمطالعه قرارگرفته است. سیستمهای ANC قصد دارند تا نویز را بهوسیله تولید یک ضد نویز کاهش دهند. این ضد نویز باعث حذف نویز اولیه میشود. شکل 1 یک پیکربندی معمول برای سیستم ANC را نشان می دهد. سیگنال تولیدشده از طریق منبع نویز از طریق مسیر پژواک اولیه به سمت نقطهای منتشر میشود که نویز باید حذف شود، بعد از اضافه شدن نویز ، سیگنال اختلال تولید میشود. ورودی سیستم کنترل نویز ( )، با منبع نویز همبستگی دارد و ازاینرو میتواند برای تولید سیگنال مورداستفاده قرار گیرد. این سیگنال بعد از انتشار از طریق یک مسیرثانویه اجتنابناپذیر با پاسخ ضربه h، به سیگنال اختلال اضافه میشوند و سیگنال خطای را تولید میکنند. هدف الگوریتم تطبیقی، ارزیابی مکرر وزن های فیلتر به طریقی است که تابع سیگنال خطای حداقل شود.
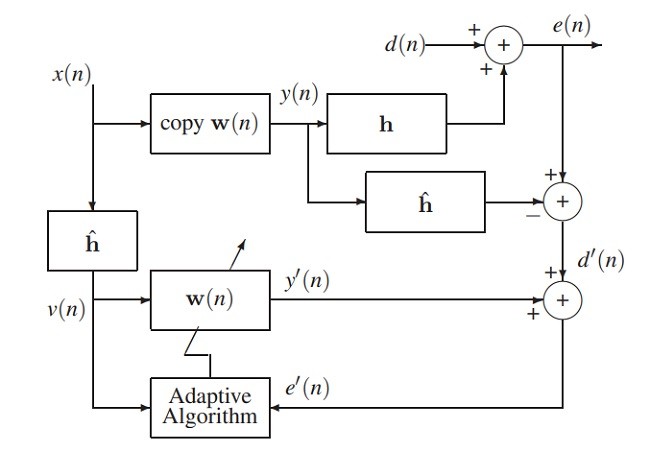
چندین اختلاف بنیادین بین یک پیکربندی ANC و تنظیمات استاندارد برای شناسایی کانال وجود دارد. اول، هیچگاه نمی توان به صورت مستقیم به سیگنال اختلال دسترسی داشت، به طوریکه تنها برای اندازه گیری خطا بعد از حذف نویز امکانپذیر است. چنین خطایی به عنوان تجمیع آکوستیکی و خروجی فیلتر تطبیقی که با h فیلتر شده، بدست می آید در حالی که در یک سناریو شناسایی استاندارد، معمولا یک تفریق در نظر گرفته میشود. دوم، مهم تر از همه، ظهور مسیر ثانویه بین خروجی فیلتر تطبیقی و سنسور نویز (که در آن اندازه گیری میشود) باعث ایجاد نیاز برای ارائه پیکربندی های تک کاره برای ANC میشود. روش معمول برای در نظر گیری این پاسخ h شامل فیلتر کردن سیگنال ورودی از طریق ارزیابی قبلی از این پاسخ h میشود. این موضوع، طرح x فیلتر شده مرسوم را تامین میکند که در شکل 2 نشان داده شده است. به عنوان جایگزینی برای FX ، ساختار x فیلتر شده تغییر یافته امکان بازیابی سیگنال اختلال ( در شکل 3) را فراهم میکند و در مقایسه با دیگر ساختارهای فیلتر کردن، بهترین عملکرد همگرائی را برای ANC تامین می کنند.
همان طور که در دیگر کاربردهای آکوستیک رخ می دهد، ملزوماتی برای فیلترهای تطبیقی طولانی در ANC وجود دارد. در ادبیات علمی فیلترکردن تطبیقی، این مسئله که الگوریتم های تصادفی گرادیان مانند حداقل مربع متوسط (LMS) یا LMS نرمالیزه شده (NLMS)، از همگرایی آهسته در چنین شرایطی بهره می برند به خوبی شناخته شده است. به منظور افزایش سرعت همگرائی، تطبیق تناسبی برای شناسایی سیستم های کم پشت یا شبه کم پشت (برای مثال سیستم هایی که در آن تنها چندین ضریب فعال برجسته است) ارائهشدهاند . اصول اجرایی برای تطبیق تناسبی نسبتا ساده است: توزیع نامتوازن انرژی تطبیقی فیلتر میان این ضرایب، تنظیم سریع تر ضرایب فعال.
طرحهای تناسبی که به صورت اولیه برای حذف پزواک شبکه و آکوستیک ارائه شدند و تا جایی که اطلاع داریم، هیچ کاری در ادبیات علمی در حوزه ANC گزارش نشده است. بنابراین، هدف اولیه این مقاله مطالعه رفتار طرحهای تناسبی در پیکربندی های FX و MFX برای ANC است. این بسط ارائهشده تاثیر گرفته از این اصل است که راهحل های بهینه در نظر گرفته شده در حذف پژواک و ANC مشخصاتی مشابه دارند، خصوصا سطح بالایی (ن اشناخته) از ارائهشدهاند . در میان طرحهایی که در دسترس هستند، فیلتر NLMS (IPNLMS) تناسبی بهبود یافته مقاله 8 در نظر گرفته میشود که در مقایسه با دیگر طرحهای مشابه، رفتار مقاومتری را ارائه میکند.
کاربرد فیلترهای تناسبی در معرض انواع مختلفی از سازش قرار دارد. برای مثال، همانند دیگر انواع فیلتر تطبیقی، انتخاب اندازه گام باعث ارائه مصالحه ای میشود که شامل سرعت همگرائی، تنظیم اشتباه فضای حالت و توانایی ره گیری میشود. علاوه بر این، فیلتر IPNLMS باعث ارائه یک پارامتر نامتقارن اضافی میشود که در عمل به ندرت شناخته شده است. انتخاب بهینه این پارامتر وابسته به سطح ارائهشدهاند راهحل بهینه است. در 9، نشان داده شده است که رویکردهای تجمیع، که در آن فیلتر هایی با توانایی های مکمل به صورتی تطبیقی برای تولید یک خروجی با کیفیت بهبود یافته، فاز بندی شده اند، می توانند به صورتی موفقیت آمیز برای کاهش دو مصالحه IPNLMS فوقالذکر به کار برده شوند.
بسط دهی تجمیع طرح فیلترهای تطبیقی به ANC ساده نیست و نیازمند ارائه تغییراتی است (مثالی از الگوریتم های تطبیقی که در 11 ارائهشده است را ببینید). بنابراین، هدف دوم این مقاله، ارائه طرحهای تجمیع IPNLMS است که می توانند به صورتی رضایت بخش با استفاده از پیکربندی های FX و MFX در یک تنظیمات ANC کار کنند. نشان میدهیم که طرحهای استنتاج شده با توجه به فیلترهای IPNLMS استاندارد باعث بهبود همگرائی، خطای فضای حالت و مقاومت در برابر سطوحی ناشناخته یا متغیر با زمان از ارائهشدهاند میشود.
باقی مقاله به صورت پیش رو سازمان دهی شده است: دو بخش بعدی، به ترتیب به عمومی سازی IPNLMS و طرحهای تجمیعی برای پیکربندی های ANC تخصیص داده شده است. سپس، عملکرد طرحهای جدید و مزایای مختلف آنها به همراه نتایج تجربی در بخش 4 مورد بحث قرار می گیرد. مقاله با ارائه نتایج اصلی کارمان به اتمام می رسد.
ABSTRACT
Proportionate adaptive schemes have been proposed to exploit sparsity and accelerate filter convergence in acoustic echo cancellation. Recently, combinations of adaptive filters have been extended to operate with proportionate schemes, in order to achieve more robust operation when the actual degree of sparsity of the optimal solution is unknown. Furthermore, it is possible to exploit the asymmetric distribution of adaptation energy in proportionate schemes to reduce the overall steady-state misadjustment. In this contribution, we explain how these novel adaptive filtering structures, which have been proposed and tested mainly for echo cancellation, can also be effectively extended to improve the usual performance trade-offs that appear in active noise control scenarios by introducing some minor modifications. Experimental results in realistic scenarios show that the proposed schemes provide an interesting alternative to the traditional use of a single adaptive filter.
1. INTRODUCTION
Active noise control (ANC) is a field of growing interest that combines digital signal processing techniques with traditional acoustics. The use of adaptive algorithms for ANC [1] has been subject of continuous study and research since the 1980s. ANC systems attempt to reduce the noise by generating an antinoise that cancels out the primary noise [2]. Fig. 1 shows a typical configuration of an ANC system. The signal produced by the noise source propagates through a primary echo path towards the point where noise is to be cancelled, producing, after the addition of noise e0(n), the disturbance signal d(n). The input to the noise control system, x(n), is correlated with the noise source, and thus can be used to generate a signal y(n) which, after propagating through an unavoidable secondary path with impulse response h, is added to the disturbance signal, producing an error signal e(n). The objective of the adaptive algorithm is to iteratively estimate the filter weights in such a way that a function of the error signal e(n) is minimized.
There are some fundamental differences between an ANC configuration and the standard setup for channel identification [2]. First, the disturbance signal can never be accessed directly, as it is only possible to measure the error after noise cancellation. Such error is obtained as the acoustical combination of d(n) and the adaptive filter output filtered by h, whereas in a standard identification scenario, a subtraction is typically considered. Second, and more importantly, the presence of a secondary path between the adaptive filter output [y(n)] and the noise sensor [where e(n) is measured] makes necessary the introduction of ad hoc configurations for ANC. The usual way to take into account this response h consists of filtering the input signal x(n) through a previous estimation of this response (hˆ), providing the conventional filtered-x (FX) scheme depicted in Fig. 2 [3]. As an alternative to the FX scheme,the modified filtered-x (MFX) structure allows recovery of the disturbance signal, d 0 (n) in Fig. 3, and provides the best convergence performance compared to other filtering structures for ANC [4, 5].
As it occurs in other acoustic applications, there is a requirement for long adaptive filters in ANC. It is a well-known result in the adaptive filtering literature that stochastic gradient algorithms, such as least-mean-square (LMS) or normalized LMS (NLMS), suffer from a slow convergence in such situations [6]. In order to speed up filter convergence, proportionate adaptation [7, 8] has been proposed for the identification of sparse or quasi-sparse systems, i.e., systems where only a few so-called active coefficients are significant. The operating principle of proportionate adaptation is rather simple: to distribute the adaptation energy of the filter unevenly among the coefficients, adapting the active coefficients faster.
Proportionate schemes were primarily proposed for acoustic and network echo cancellation and, to the best of our knowledge, no work has been reported in the literature in the context of ANC. Thus, a first objective of this paper is to study the behavior of pro portionate schemes in FX and MFX configurations for ANC. This extension is motivated by the fact that the optimal solutions encountered in echo cancellation and ANC share similar properties, particularly a high (but unknown) degree of sparsity. Among the different available schemes, we will consider the improved proportionate NLMS (IPNLMS) filter of [8], which offers a more robust behavior than other similar schemes.
The application of proportionate filters is subject to different kinds of compromises. For instance, as with any other kind of adaptive filter, the selection of the step size introduces a trade-off involving speed of convergence, steady-state misadjustment, and tracking capability. Furthermore, the IPNLMS filter introduces an additional asymmetry parameter, whose optimal selection is dependent on the degree of sparsity of the optimal solution, which is rarely known in practice. In [9], it was shown that combination approaches, where filters with complementary capabilities are adaptively fused to produce an output of improved quality (see also [10]), can be successfully applied to alleviate the two aforementioned IPNLMS compromises.
Extending the combination of adaptive filters scheme to ANC is not straightforward, and requires the introduction of some changes (see as an example the adaptive algorithms introduced in [11]). Thus, a second goal of this paper is to present IPNLMS combination schemes that can satisfactorily work in an ANC setup, both using the FX and MFX configurations. We will show that the derived schemes improve convergence, steady-state error, and robustness to unknown or time-varying degrees of sparsity, with respect to standard IPNLMS filters.
The rest of the paper is organized as follows: The next two sections are devoted to the generalization of IPNLMS and combination schemes, respectively, for ANC configurations. Then, the performance of the new schemes, and their different benefits, are discussed together with experimental results in Section 4. The paper finishes presenting the main conclusions of our work.
چکیده
1. دیباچه
2. فیلترهای تطبیقی تناسبی برای ANC
3. تجمیع برجسته الگوریتم های IPNLMS
3.1. اصول کلی برای طرحهای تجمیع
3.2. ساختار x فیلتر شده متعارف
3.3. ساختار x فیلتر شده تغییر یافته
4. نتایج شبیه سازی
4.1. مقایسه فیلترهای IPNLMS-FX و NLMS-FXپ
4.2. تجمیع فیلترهای IPNLMS با اندازه های گام مختلف
4.3. تجمیع فیلترهای IPNLMS با فاکتورهای نامتقارن مختلف
5. نتیجه گیری
Abstract
1.Introduction
2.Proportionate Adaptive Filters for Anc
3.Convex Combination of Ipnlms Algorithms
3.1 General principles of combination schemes
3.2 Conventional filtered-x structure
3.3 Modified filtered-x structure
4.Simulation Results
4.1 Comparison of the IPNLMS-FX and NLMS-FX filters
4.2 Combination of IPNLMS filters with different step sizes
4.3 Combination of IPNLMS filters with different asymmetry factors
5.Conclusions