
دانلود رایگان مقاله پروتکل مسیریابی مبتنی بر خوشه بندی برای شبکه های حسگر بی سیم زیرآب
چکیده
در شبکههای حسگر بیسیم زیرآب (UWSNs) گرهها با محدودیت در انرژی باتری روبهرو هستند و جایگزینی باتری با توجه به محیط زیرآب بسیار پرهزینه است. بنابراین، روش EBECRP، پروتکل مسیریابی مبتنی بر خوشهبندی انرژی کارآمد و مصرف متعادل انرژی برای UWSNs را پیشنهاد میکنیم. در پروتکل مسیریابی مبتنی بر عمق، گرههای نزدیک (گرههای کم عمق) در هیچ زمانی به دلیل بار بالا از بین نمیروند. ما از مسیریابی مبتنی بر عمق در طرح پیشنهادی جلوگیری میکنیم و از sink برای تعادل بار بر روی تمام گرهها استفاده میکنیم. همچنین از مفهوم خوشه بهمنظور کاهش در نتایج مصرف انرژی استفاده میکنیم. سرخوشهی انتخاب شده (CHS) اطلاعات را از گره همسایه برای کاهش ارتباطات جهانی در ارتباطات فشرده محلی جمعآوری میکند. نتایج شبیهسازی نشان میدهد که EBECRP به حداکثر ثبات و طول عمر شبکه در طول حیات دست مییابد.
1. مقدمه
در چند سال گذشته، UWSNs بهدلیل برنامههای کاربردی خود مانند نظارت محیطی برای اکتشاف علمی، کنترل آلودگی، نظارت نظامی، پیشگیری از فاجعه، تحقیق و بررسی، استخراج نفت و غیره محبوبیت بسیاری در حوزهی پژوهش به دست آورده است [1]. UWSNs شامل sinkها و گرههای حسگر صوتی است. گرههای حسگر صوتی دادهها را از محیط دریافت و به دنبال مسیریابی روبه جلو برای sink اطلاعات جمعآوری شده است. گره سنسور صوتی دارای قدرت باتری محدودی است که در آن هیچ محدودیت انرژی در sink وجود ندارد [2].
بسیاری از پروتکلهای مسیریابی برای شبکههای حسگر بیسیم زمینی (WSN ها) پیشنهاد شدهاند. این پروتکل مسیریابی موجود ممکن است برای محیط زیرآب مناسب نباشد [3]. WSN از امواج رادیویی برای برقراری ارتباط استفاده میکند که در آن UWSNs از کانال آکوستیک برای برقراری ارتباط استفاده میکند. سیگنالهای رادیویی در آب بهدلیل تضعیف سریع به خوبی کار نمیکنند. سیگنالهای صوتی ویژگیهای منحصر به فردی دارند: تاخیر طولانی انتشار، سیگنال بالا برای نرخ نویز، پهنای باند کم و غیره. با توجه به این ویژگیها، توسعهی پروتکل مسیریابی کارآمد و مقیاسپذیر برای UWSNs بسیار چالشبرانگیز است [4].
گرههای حسگر زیرآب دارای منابع محدودی هستند: قدرت باتری، ظرفیت حافظه، قابلیت پردازش، پهنای باند و غیره. جایگزینی باتری در محیطهای آبی دشوار است [5]. محیطهای آبی نیاز به یک پروتکل مسیریابی انرژی کارآمد دارند. مصرف کارآمد انرژی بهعنوان، دستیابی به بار با مصرف انرژی کمتر تعریف شده است [10]. مصرف کارآمد انرژی در ارتباط مستقیم با طول عمر شبکه است. علاوه بر این طول عمر شبکه با مصرف متعادل انرژی گرهها در شبکه و با تقسیم بار در گره بهبود مییابد.
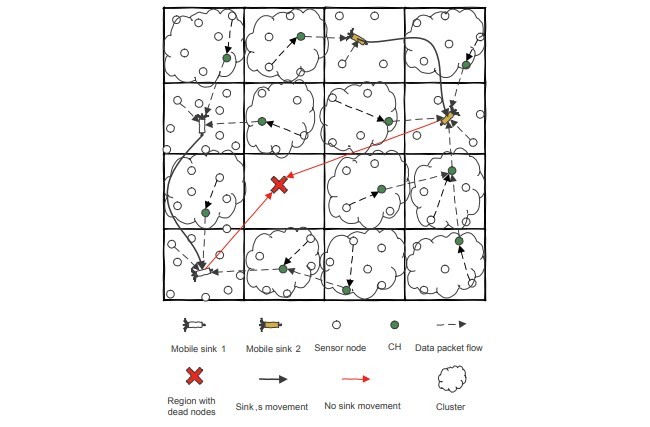
در [4-9]، sink استاتیک در سطح آب قرار میگیرد. بااین حال، در sink استاتیک گرههای حسگر نزدیک به sink زودتر از بین میروند چرا که گرههای کم عمق دارای بار نامتعادل و بستههای رو به جلو نسبت به گرههای با عمق بالا هستند. این بار نامتعادل بر روی گرههای حسگر، شکاف مسیریابی در شبکه ایجاد میکند و منجر به مشکل hotspot میشود. از این رو، بهتر است از sink تلفن همراه برای جمعآوری اطلاعات از گرههای حسگر استفاده کنیم [2] [11]. بنابراین، روش EBECRP را پیشنهاد میکنیم که از مسیریابی مبتنی بر عمق و اجرای خوشه براساس مسیریابی با تحرک sink اجتناب میکند. در مسیریابی مبتنی بر عمق، گرههای با عمق کم هیچ موقع بهدلیل بار نامتعادل روی گره نزدیک به sink از بین نمیروند. بهمنظور مقابله با این مسئله از sink تلفنهمراه در EBECRP استفاده میکنیم، که موقعیت خود را مرتبا تغییر میدهد. برای کاهش تعداد انتقالات از مفهوم خوشه استفاده میکنیم. در خوشه هر گره مسئول ارتباط با CH مربوط به آن است. هر CH دادهها را از گره در مجاورت دادههای جمعآوری شده برای sink جمعآوری میکند. بنابراین، تشکیل خوشه موجب صرفهجویی در انرژی با فشردهسازی دادهها در CH و کاهش ارتباطات جهانی برای فشردهسازی محلی ارتباطات میشود [12]. با استفاده از تحرک sink و خوشهبندی، مصرف متعادل انرژی در شبکه بدست میآید، در نتیجه موجب بهبود دورهی ثبات و طول عمر شبکه میگردد.
ادامه مقاله به شرح زیر سازماندهی شده است. کارهای گذشته در بخش دوم بحث شده است. بخش سوم مربوط به انگیزه و جزئیات طرح پیشنهادی EBECRP است که در بخش چهارم نشان داده شده است. در بخش پنجم عملکرد EBECRP بیان شده است. نتیجهگیری در بخش ششم و در نهایت مراجع در پایان مقاله آورده شده است.
2. کارهای گذشته
LEACH [13] اولین پروتکل مسیریابی براساس خوشه برای شبکههای حسگر بیسیم زمینی است. هدف اصلی LEACH کاهش ارتباطات جهانی به ارتباطات فشرده محلی با استفاده از مفهوم خوشهبندی است. شکلگیری خوشه براساس حداقل فاصله و قدرت سیگنال دریافت شده است. در خوشه یک CH وجود دارد؛ که مسئول جمعآوری دادهها از گرهها به ایستگاه پایه (BS) است. در LEACH CH، انتخاب بهطور تصادفی و در طول زمان برای حفظ تعادل بار بر روی گرهها به هنگام مصرف انرژی صورت میگیرد.
در منبع [14]، نویسندگان الگوریتم مسیریابی متعادلکنندهی انرژی را برای WSN براساس روش MIMO مجازی پیشنهاد دادهاند. الگوریتم پیشنهاد شده دارای سه بهبود بر روی الگوریتم مسیریابی LEACH و انتخاب سرخوشه بهتر، مصرف انرژی و کاهش اندازههای مختلف توزیع سر خوشه است. برای انتخاب سرخوشه، الگوریتم مصرف باقیماندهی انرژی جدیدترین گرهها و کل شبکه را به منظور تعادل مصرف انرژی در میان سنسورهای مختلف گره در نظر میگیرد. الگوریتم پیشنهادی عملکرد بهترینسبت به الگوریتم LEACH در مصرف انرژی و زمان زندگی شبکه نشان میدهد.
Ashfaq و همکارانش طرح مسیریابی براساس خوشه را [10] برای به حداکثر رساندن طول عمر و توان WSN پیشنهاد دادند. انتخاب سرخوشه CH بسیار شبیه به LEACH است که در آن هر گره یک عدد تصادفی تولید میکند و با مقدار آستانه مقایسه میکند. اگر عدد تصادفی تولید شده کمتر از مقدار آستانه باشد گره به عنوان CH انتخاب میشود و در غیراینصورت انتخاب نمیشود. پس از انتخاب، مکانیزم انتخاب طبیعی برای انتخاب تعداد مطلوب سرخوشه در شبکه استفاده میشود. اگر سرخوشه انتخاب شده کمتر از تعداد بهینه سرخوشهها باشد (ده درصد از کل گرهها در شبکه) سرخوشههای دور (ACH)2 مجدد انتخاب میشوند. اگر سرخوشه انتخاب شده بزرگتر از تعداد بهینه باشد، سرخوشهها به حداقل میرسند. درغیر این صورت طرح عملیاتی انجام میگیرد. در این روش (ACH)2 خوشههای با اندازه یکسان است که در نتیجه بار یکنواخت در سرخوشه توزیع میگردد. (ACH) 2 از انتقال اجتناب میکند؛ که در آن گره در ارتباط با CH، تمام فاصلههای گرهها از BS را افزایش میدهد.
Abstract
In Underwater Wireless Sensor Networks (UWSNs) nodes are equipped with limited battery power and battery replacement is expensive due to underwater harsh environment. Therefore, we propose EBECRP an energy Efficient and Balanced Energy consumption Cluster based Routing Protocol for UWSNs. In depth base routing protocols nodes near the sink (low depth nodes) die in no time because of high load. We avoid depth base routing in our proposed scheme and use mobile sinks to balance load on all nodes. We also use the concept of clustering to reduce multi hoping which results in more energy consumption. The selected Cluster Heads (CHs) collect data from one hope neighbor nodes to reduce global communication into locally compressed communication. Simulation results show that EBECRP achieves maximum stability period and network life time.
I. INTRODUCTION
From the last few years UWSNs have gained popularity in research area because of their applications like environmental monitoring for scientific exploration, pollution monitoring, military surveillance, disaster prevention, resource investigation, oil extraction etc [1]. The UWSNs consist of sink(s) and acoustic sensor nodes. Acoustic sensor nodes collect data of interest from the environment and follow routing path to forward that data to the sink. The acoustic sensor nodes have limited battery power where no energy constraint on sink [2].
Many routing protocols are proposed for terrestrial Wireless Sensor Networks (WSNs). These existing routing protocols may not be suitable for underwater environment [3]. WSNs use radio waves for communication where UWSNs use acoustic channels for communication. Radio signals do not work well in water because of rapid attenuation. The acoustic signals have unique characteristics: long propagation delay, high signal to noise ratio, low bandwidth etc. Due to these characteristics developing efficient and scalable routing protocol for UWSNs is very challenging [4].
Underwater sensor nodes have limited resources: battery power, memory capacity, processing capability, bandwidth etc.Battery replacement in aquatic environment is difficult [5]. Aquatic environment needs an energy efficient routing protocol. Efficient energy consumption is defined as, we achieve more work load with less energy consumption [10]. Efficient energy consumption is in direct relation with network life time. In addition network life time is improved with balanced energy consumption of nodes in the network by dividing equally load on nodes.
In [4–9], involve static sink(s) which are deployed on water surface. However, in static sink(s) the sensor nodes which are closed to the sink die earlier because low depth nodes have unbalanced load and forward more packets than high depth nodes. This unbalanced load on sensor nodes creates routing holes in the network, result in hotspot problem. Hence, it is better to use mobile sinks for collecting information from sensor nodes [2] [11]. Therefore, we propose EBECRP which avoids depth base routing and performs cluster based routing with sinks mobility. In depth based routing low depth nodes die in no time because of unbalanced load on the nodes near the sink(s). In order to tackle this we use mobile sinks in EBECRP, which change their position frequently. To reduce the number of transmissions we use the concept of clustering. In clustering each node is responsible to communicate with its respective CH. Each CH collects data from the nodes in its vicinity and forwards collected data to sink. Thus, cluster formation saves energy by performing data compression at CH and reduces global communication to locally compressed communication [12]. By using sink mobility and clustering the balanced energy consumption is achieved in the network, result in improved stability period and network life time.
The rest of the paper is organized as follows. Related work is discussed in section II. Section III deals with motivation and the detail work of our proposed scheme EBECRP is shown in section IV. In section V we present the performance of EBECRP. Conclusion is given in section VI and finally references are given at the end of paper.
II. RELATED WORK LEACH
[13] is the first cluster based routing protocol for terrestrial WSNs. The main purpose of LEACH is to reduce global communication into locally compressed communication by using the concept of clustering. Cluster formation is based on the minimum distance and received signal strength. In each cluster there is one CH; responsible for collection of data from nodes and forward to Base Station (BS). In LEACH CH selection is randomly rotated over time to balance load on the nodes in term of energy consumption.
In [14], authors proposed energy balanced routing algorithm for WSNs based on virtual MIMO technique. The proposed algorithm has three improvements over the conventional LEACH routing algorithm in term of better cluster head selection, energy consumption and mitigates the different size cluster head distributions. For cluster head selection, the algorithm considers the residual and most recent energy expenditure of the nodes and the whole network, in order to balance the energy consumption among different sensors nodes. The propose algorithm shows better performance over the conventional LEACH algorithm in term of energy consumption and network life time.
Ashfaq et al. proposed cluster based routing scheme [10] to maximize lifetime and throughput of WSNs. The CHs selection is similar to that of LEACH where each node generates a random number and compares with threshold value. Node is elected as CH if the generated random number is less than the threshold value and is not selected for the last 1/p rounds. After election, natural selection mechanism is used to choose optimal number and distant CHs in the network. If the selected CHs is less than the optimal number of CHs (ten percent of the total nodes in network) the Away Cluster Heads (ACH)2 carried out re-election. If the selected CHs are greater than the optimal number, CHs are minimized in number. Otherwise scheme operation is carried out. In this way (ACH)2 has clustered of almost same size which results in uniform load on CHs. (ACH)2 avoids back transmission; where node associates with the CH which increases over all distance of the node from BS.
چکیده
1. مقدمه
2. کارهای گذشته
3. انگیزه
4. EBECRP: طرح پیشنهادی
A. تحرک sink و تشکیل منطقه
B. مقداردهی اولیه شبکه و پیکربندی
C. تشکیل سرخوشه CH
D. انتقال داده
5. شبیهسازی و نتایج
A. پارامترهای عملکرد: تعریف
B. پارامترهای عملکرد: بحث ها
C. عملکرد
6. نتیجهگیری
منابع
Abstract
1. INTRODUCTION
2. RELATED WORK
3. MOTIVATION
4. EBECRP: PROPOSED SCHEME
A. Sink mobility and region formation
B. Network initialization and configuration
C. CHs formation
D. Data transmission
5. SIMULATION AND RESULTS
A. Performance parameters: Definition
B. Performance parameters: Discussions
C. Performance trade-offs
6. CONCLUSION
REFERENCES