دانلود رایگان مقاله قدرت نوسانات TCSC و طراحی PSS با استفاده از الگوریتم ژنتیک
چکیده
در این مقاله هماهنگی PSS و POD در یک سیستم قدرت SMIB مجهز به کنترل موثر TCS C. S OME با استفاده از طرح های PSS و POD برای بهبود قدرت پایداری سیستم ارائه شده است. این کنترل کننده سیگنال های مکملی را تولید می کنند، سیگنال خروجی PSS برای دستگاه و دو مرحله طرح پیشفاز و پسفاز برای جبران در POD برای TCS C در ساختار PS S در نظر گرفته شد. طراحی کنترل جدید، کنترل بهینه خطی مرتبط با طرح های کنترل معین، در هر دو طرح PSS و طراحی POD ارائه شده است. با انتخاب اوزان ماتریس Q در رابطه نزدیک با تغییر قطب حلقه، کنترل بهینه معین پیشنهاد شده فرموله شده است. روش GA برای تعیین پارامتر کنترل برای هر دو PS S و POD استفاده شد. پویایی و پایداری سیستم قدرت با کنترل کننده پیشنهادی با استفاده از اغتشاش کوچک به سیستم قدرت، 20٪ تنوع بار مورد بررسی قرار گرفت. نتایج شبیه سازی نشان می دهد که حضور TCSC در شبکه قدرت ارائه شده توسط PSS و کنترلر POD برای بهبود پایداری سیستم بسیار بالقوه است. 45٪ کاهش اورشوت حاصل شد، آن به طور قابل توجهی از زمان کوتاه به دست آمده است، اگر چه MO POD کوتاه تنها 16٪ از PS S کوتاه تر است. مقادیر ویژه غالب به سمت منطقه با ثبات تر تغییر جهت می دهند، بخشی واقعی از مقادیر ویژه به مقادیر جدید جدید -0.1 در آستانه دست خواهند یافت. این نتیجه نشان می دهد که کنترل بهینه معین پیشنهاد شده دارای یک عملکردی خوبی است. نتایج شبیه سازی نشان داد که نقش کنترل کننده POD غالب تر از PS S است، با این حال هر دو PSS و کنترلر TCSC POD به طور همزمان در حال حاضر یک تعامل مثبت با یکدیگر دارند.
1. مقدمه
پیشرفت های اخیر در الکترونیک قدرت منجر به استفاده از سیستم جریان متناوب انتقال جریان انعطاف پذیر (FACTS) در دستگاه های در سیستم قدرت شده است. ادوات FACTS توانایی افزایش انعطاف پذیری و بهره برداری سیستم قدرت و کنترل، ثبات سیستم و بهره برداری از سیستم های قدرت موجود را دارا می باشند[1]. یکی از ادوات FACTS، تریستور کنترل خازن های سری (TCSC) است. TCSC متشکل از یک خازن و یک راکتور کنترل تریستور (TCR) می باشد.
TCSC به طور کلی در خط انتقال طولانی مدت از یک سیستم قدرت نصب شده است. برخی از نقش های TCSC شامل برنامه ریزی جریان برق، کاهش قطعات نامتقارن، کاهش از دست دادن خالص، پشتیبانی ولتاژ، محدود کردن جریان اتصال کوتاه، میرایی نوسانات قدرت؛ و افزایش پایداری گذرا می باشد[2]، [3]. اساس توابع TCSC توانایی آن ها برای دادن راکتانس القایی یا خازنی خط انتقال است.
تغییر بار در سیستم قدرت می تواند نوسانات فرکانس پایین را القا کند. این نوسانات ممکن است باعث حفظ و رشد نمایند و باعث از دست دادن هماهنگی بین ژنراتورها شوند. سیستم قدرت تثبیت کننده (PSS) است به مرطوب کردن نوسانات در سال های اخیر استفاده شده است. سیستم قدرت تثبیت کننده (PSS) برای خنثی کردن نوسانات در سال های اخیر استفاده شده است. مشکل این دستگاه این است که میرایی کافی نمی دهد. به منظور دستیابی به عملکرد بهینه اغتشاش کوچک، هماهنگی بین PSS و TCSC مورد نیاز است [2].
مطالعات اخیر TCSC نشان می دهد که نصب و راه اندازی TCSC در خط انتقال می تواند باعث افزایش پایداری گذرا و نوسانی شود[1]، [2]. سیگنال کنترل اضافی برای TCSC توسعه داده شده است و به منظور بهبود عملکرد TCSC بر روی آن اعمال شده است. این سیگنال کنترل های اضافی است که میرایی نوسانات قدرت (POD)نامیده می شود. برخی مطالعات نشان دهنده آن است که با استفاده از POD می توان نوسانات میرایی را بهبود بخشید و باعث افزایش پایداری سیستم قدرت شد [2].
روش های مختلفی برای کنترل PSS و POD استفاده شده است. روش های مانند جبران تاخیر پیشفاز و پسفاز و کنترل کننده PID در مقالات متعدد مطالعه شده و گزارش شده است. پاندا، همکاران [5] جبران تاخیر پیشفاز و پسفاز و روش کنترل کننده PID در اختلالات مختلف را مقایسه کرده اند. نتایج شبیه سازی نشان می دهد که جبران تاخیر پیشفاز و پسفاز روش بهتری است. مطالعات دیگری نیز نشان داد که روش جبران تاخیر پیشفاز و پسفاز نوسانات بهتر میرایی و پایداری سیستم در سیستم قدرت بهتری را می دهد [2]، [3]، [5]، [6]. مشکل تدبیر پارامتر PSS و کنترلر TCSC یک تمرین پیچیده است. در برخی از موارد از روش های معمول مانند انتصاب مقادیر ویژه، برنامه ریزی ریاضی، روش گرادیان برای بهینه سازی و نظریه کنترل مدرن برای تدبیر PSS و کنترلر TCSC استفاده می شود. مشکل این است که روش های معمول نیاز به بار محاسبات سنگین و وقت گیر برای قدرت های بزرگ دارند [5]. به تازگی، روش ابتکاری، الگوریتم ویژه ژنتیک (GA)، برای طراحی PSS و کنترلر TCSC بسیار محبوب است. دلیل محبوبیت GA مزایای آن است. استحکام GA در پیدا کردن راه حل بهینه و توانایی و ارائه یک راه حل بهینه نزدیک به حداقل جهانی یکی از مزایای استفاده از GA است. GA با استفاده از چند نقطه به جای تک نقطه به جستجو راه حل بهینه می پردازد، پس آن همگرایی سریعتری نیز برخوردار است [8]. مطالعات قبلی اثربخشی GA برای طراحی کنترلر را نشان می دهند. تحقیقات منجر به بهبود میرایی نوسانات سیستم و قدرت و ثبات آن ها می شوند [5]، [7-9]. دیگر روش های اکتشافی مانند بهینه سازی ازدحام ذرات، منطق فازی، شبیه سازی و فولاد، و غیره نیز برای گرفتن نتایج بهتر استفاده می شوند. مطالعات قبلی نشان می دهد که طراحی کنترلر TCSC همیشه جالب و مورد نیاز است برای بهبود قدرت پایداری سیستم لازم است.
کنترل خطی بهینه (LOC) یک روش کنترلی است که در آن سیستم کنترل در معادلات حالت خطی توصیف شده است. کنترل با به حداقل رساندن تابعی از هر دو انحراف حالت و تلاش هایی برای کنترل طراحی شده است. ویژگی های اصلی نرم افزار کنترلر تعیین بهینه Q و ماتریس وزن R است. فرض کنید R نسبتا ثابت است، تابع هدف باید با انتخاب Q فرموله شود. عنصر ماتریس Q نشان دهنده وزن متغیر حالت خاص است، زمانی که وزن متغیر حالت شناخته شده است و کنترل بهینه می تواند تعیین شود. کنترل بهینه مشخصه سیستم پویا را تغییر می دهد، قطب (ویژه) از این سیستم حلقه بسته باید نشان دهنده یک پاسخ دینامیکی بهتر برای این سیستم باشد، این تکنیک به معنی کنترل بهینه مودال (MO) است.
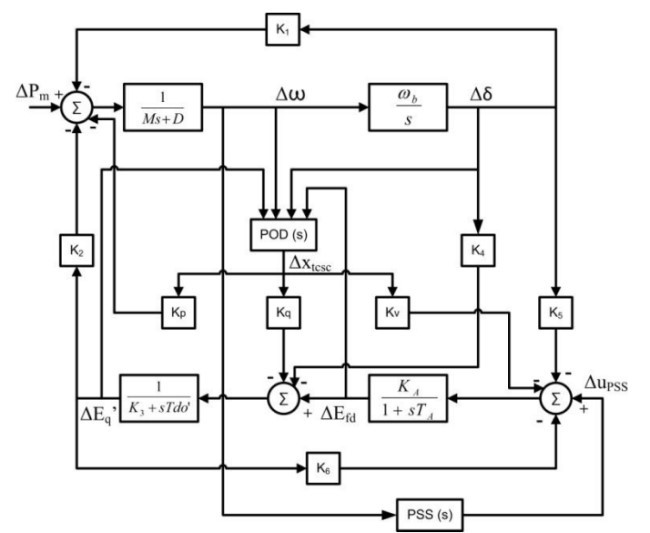
هدف اصلی از این مطالعه بررسی اثربخشی نوسانات عملکرد TCSC در یک ماشین سیستم (SMIB) قدرت باس بی نهایت، با استفاده از موارد زیر است: تثبیت کننده سیستم جبران پیش فاز و پس فاز (PSS)، LOC و POD بر اساس (LOC POD) و غلاف طراحی کنترل طرح معین بهینه جدید (MO POD). GA برای طراحی پارامتر کنترلر PSS و اوزان ماتریس Q از LOC و MO استفاده می شود.
Abstract—
This paper presents the coordination of PSS and POD in a SMIB power system equipped with TCSC. Some effective controller using PSS and POD schemes were proposed to improve power system stability. These controllers produced supplementary signals, the PSS output signal for machine and the POD’s for TCSC. A two stage lead lag compensator scheme was considered in the PSS structure. A new controller design, linear optimal control associated with modal control schemes, is proposed in both PSS and POD design. By selecting the weighting matrix Q in conjunction with the close loop pole shifting, the proposed modal optimal control has been formulated. The GA method was used to determine the parameter controllers for both PSS and POD. The dynamic and stability of power system with proposed controllers was investigated by using small disturbance to power system, 20% load variation. Simulation results show that the presence of TCSC in power system network provided by PSS and POD controller is very potential to improve system stability. A 45% of overshoot reduction could be reached, it is obtained significantly settling time shorter, although the MO POD shorter only 16% than PSS ones. The dominant eigenvalues shift to the more stable area, the real part of new eigenvalues approach their threshold -0.1. This result indicates that the proposed modal optimal control has a good performance. Simulation results also revealed that the role of POD controller is more dominant than the PSS, however both PSS and TCSC POD controller simultaneously present a positive interaction.
I. INTRODUCTION
Recent developments of power electronics result in the use of flexible alternating current transmission system (FACTS) devices in power system. FACTS devices have the ability to increase power system operation flexibility and controllability, system stability and utilization of existing power systems [1]. One of the FACTS device is thyristor controlled series capacitor (TCSC). A TCSC is consists of a capacitor and a thyristor controlled reactor (TCR).
TCSC is generally installed in long transmission line of a power system. Some roles of a TCSC are scheduling power flow, decreasing unsymmetrical components, reducing net loss, providing voltage support, limiting short-circuit currents, damping the power oscillation; and enhancing transient stability [2], [3]. The basis of TCSC’s functions is the ability to give inductive or capacitive reactance to transmission line.
Load changing at power system could induce low frequency oscillations. These oscillations may sustain and grow to cause loss of synchronization between generators. Power system stabilizer (PSS) has been used to damp out oscillations in recent years. The problem is this device may not give adequate damping. In order to achieve an optimal small disturbance performance, the coordination between PSS and TCSC is needed [2].
Recent studies of TCSC show that installation of TCSC in transmission line could enhance transient and oscillatory stability [1], [2]. Additional control signal for TCSC has been developed and applied to improve TCSC performance. This additional control signal is called power oscillation damping (POD). Some studies represent that using POD could improve oscillations damping and enhance power system stability [2].
Different methods have been applied to control PSS and POD. Methods such as lead-lag compensation and PID controller have been studied and reported in several papers. Panda, et al [5] compares lead-lag compensation and PID controller method at different disturbances. Simulation results show that lead-lag compensation is a better method. Another studies also represent that lead lag compensation method gives better oscillations damping and system stability in power system [2], [3], [5], [6]. The problem to devise PSS and TCSC controller parameter is a complex exercise. Some paper used conventional techniques such as eigenvalue assignment, mathematical programming, gradient procedure for optimization, and modern control theory to devise PSS and TCSC controller. The problem is conventional techniques requires heavy computation burden and time consuming for large power system [5]. Recently, heuristic method, especially genetic algorithm (GA), is very popular to design PSS and TCSC controller. The reason behind the popularity of GA is its advantages. The robustness of GA in finding optimal solution and ability to provide a near optimal solution close to a global minimum is one of the advantage of GA. GA uses multiple point instead of single point to search optimal solution, so it convergence faster [8]. Previous studies show the effectiveness of GA to design the controller. The investigation result an improvement of oscillation damping and power system stability [5], [7-9]. Another heuristic methods such as particle swarm optimization, fuzzy logic, simulated annealing, etc. have been investigated to get better performance index [10], [11]. These previous studies show that designing TCSC controller is always interesting and needed to improve power system stability.
Linear optimal control (LOC) is a method of control where the system controlled is described in linear state equations. The control is designed by minimizing a function of both state deviations and control effort. The main characteristic of the application of optimal control is the determination of weighting matrix Q and R. Supposed R is relatively constant, the objective function should be formulated by selection of matrix Q. The element of matrix Q represent the weight of certain state variable, when the weight of state variable are known, the optimal control can be determined. The optimal control will modify the system dynamic characteristic, the pole (eigenvalue) of this close loop system should be represent a better system dynamic response, this technique namely modal optimal (MO) control.
The main objective of this study is to investigate the effectiveness of damping function of TCSC in single machine infinite bus (SMIB) power system, by applying: lead-lag compensation Power System Stabilizer (lead-lag PSS), LOC based POD (LOC POD) and a new controller design scheme modal optimal control POD (MO POD). GA is used to design PSS controller parameter and weighting matrix Q of LOC and MO.
چکیده
1. مقدمه
2. مدل سیستم قدرت و طراحی کنترلر
A . پیکربندی سیستم
B. مدل پویا سیستم
مدل خطی
C. کنترل طراحی
طراحی PSS
طراحی LOC POD
3. طراحی مودال بهینه POD با استفاده از الگوریتم ژنتیک
A. الگوریتم ژنتیک
B. انتخاب Q با استفاده از GA برای کنترل معین
4. شبیه سازی عددی
A. سیستم تحت مطالعه
B. نتیجه شبیه سازی و بحث
سیستم بدون PSS و POD
عملکرد کنترل PSS
عملکرد کنترل MO POD
5. نتیجه گیری و تحقیقات آینده
منابع
Abstract
1. INTRODUCTION
2. POWER SYSTEM MODEL AND CONTROLLER DESIGN
A. System Configuration
B. System Dynamic Model
Linearised model
C. Controllers Design
PSS design
LOC POD design
3. MODAL OPTIMAL POD DESIGN USING GENETIC ALGORITHM
A. Genetic Algorithm
B. Selection Q using GA for modal control
4. NUMERICAL SIMULATION
A. System under Study
B. Simulation Result and Discussion
System without PSS and POD
PSS controller performance
MO POD control performance
5. CONCLUSION AND FUTURE RESEARCH
REFERENCES