دانلود رایگان مقاله پیاده سازی بلادرنگ روش کنترل جریان فازی انطباقی
خلاصه
بهینه سازی عملکرد شبکه های سیستم قدرت با استفاده از روش های مرسوم بدلیل ذات پیچیده سیستم های شدیدا غیرخطی و غیرثابت، بسیار دشوار است. در این بررسی یک کنترلر جریان ترکیبی انطباقی هیسترزیس فازی برای فیلتر قدرت فعال موازی (SAPF) ارائه شده است. ایده هیسترزیس انطباقی مرسوم با استفاده از کنترلر منطق فازی (FLC) ترکیبی شده است و امکان برطرف کردن عدم قطعیت در سیستم را فراهم کرده است. در واقع کنترلرهای تناسبی-انتگرالی (PI) در فیلتر فعال موازی مبتنی بر یک مدل خطی سازی شده هستند که در شرایط گذرا قادر به واکنش نیست. از سوی دیگر، قابلیت بکارگیری FLC در بسیاری از زمینه های مهندسی گسترش یافته و نتایج قابل قبولی در بسیاری از شرایط کاری فراهم می سازد و در دستیابی به شرایط عالی، مانند پایداری و صلب بودن برای هر سیستمی کمک می کند. تمامی این موارد در ایجاد انگیزه به منظور استفاده از FLC در کاربری های SAPF موثر بوده است. با بکارگیری یک باند هیسترزیس انطباقی فازی، فیلتر قدرت فعال (APF) تحت شرایط گذرا و مانا قابلیت جبران پذیری بی نظیری بدست می آورد. به منظور اعتبارسنجی روش ارائه شده، این سیستم بر روی یک شبیه سازی دیجیتال بلادرنگ پیاده سازی شده و نتایج مناسبی در تایید آن گزارش شده است.
1. معرفی
شاید توان الکتریکی ضروری ترین ماده خام استفاده شده در صنعت و تبلیغات این زمانه باشد. می توان از آن به عنوان کالایی غیرمعمول نام برد چرا که بصورت یک جریان مداوم مورد نیاز است. از دید مشتریان، تامین پیوسته جنبه ای مهم است اما امروزه، با توجه به وجود بارهای غیرخطی، بنظر می رسد پیوستگی آن تحت الشعاع قرار گرفته است که تمامی آن بدلیل مسائل کیفی قدرت است. لازم است بدانیم که بار الکتریکی از نوع استاتیک نیست. اختلاف دوره کاری تجهیزات و تغییر در الگوی کاری منجر به تغییر مداوم الگوی باری می شود. این موضوع خود باعث تولید هارمونیک ها می گردد. امروزه، هارمونیک واژه ای رایج است که از زبان مشتریان در مورد دستگاه های الکتریکی می شنویم. هرچند هارمونیک های ولتاژ و جریان به خودی خود بطور نامحسوس وجود دارند، پدیده های فیزیکی ناشی از آنها کاملا ملموس هستند [1]. آثار سوء هارمونیک ها در سیستم های قدرت الکتریکی کاملا واقعی و خطاهای رخ داده ناشی از هارمونیک های جریان و قدرت در اغلب اوقات بدون هشدار است. برای کاهش انتشار هارمونیک، فیلترهای فعال و غیرفعال ارائه شده اند. با این وجود، فیلترهای غیرفعال کمبودهایی مانند مشخصات جبرانگر ثابت [2]، تشدید موازی و سری با هارمونیک های ولتاژ منبع و مشخصه فیلترکنندگی شدیدا متاثر از امپدانس منبع دارند. علاوه بر آن، ذاتا حجیم بوده و عملکرد موثر خود را با گذشت زمان از دست می دهند. به این دلایل فیلترهای فعال به عنوان راه حلی در برابر مشکلات فیلتر غیرفعال ارائه شده اند. ویژگی های جذاب فیلترهای فعال اندازه کوچکتر و قابلیت تقلیل جریان های هارمونیکی در سیستم های قدرت از طریق تزریق جریان جبرانی مساوی ولی مخالف با آن است [3-5]. با وجود این ویژگی ها، کنترل موفق فیلترهای فعال نیازمند جریان مرجع دقیقی است که منجر به جبرانسازی دقیق شده و تبدیل به هدف اصلی ما در توسعه یک کنترلر مناسب برای APF است. با این حال این مقاله بطور کامل در ارتباط تشخیص های کنترلر است. از سوی دیگر برای دستیابی به جبرانسازی با اقدام کنترلی سریع، کنترلرهای هیسترزیس استفاده می شوند. در واقع در میان روش های مختلف PWM، روش کنترل جریان PWM باند هیسترزیس بدلیل سادگی پیاده سازی آن بطور فراگیر استفاده می شود [6]. علاوه بر حلقه جریان پاسخ سریع و قابلیت محدود کنندگی جریان قله-¬ذاتی، در این روش نیازی به هیچگونه اطلاعات در مورد پارامترهای سیستم نیست. باوجود چنین مزیتی، کنترل جریان با باند هیسترزیس فیکس شده دارای این کاستی است که بسامد PWM درون یک باند تغییر می کند چرا که برای کنترل تمامی نقاط موج اصلی به ریپل جریان قله تا قله نیاز است. در واقع این موضوع منجر به افزایش تلفات کلیدزنی در سیستم می شود. به منظور پرهیز از این محدودیت ها، یک کنترلر هیسترزیس انطباقی توسط نویسنده توسعه یافته است [7]. مشخصه جالب توجه این روش آن است که می توان باند کاری را بصورت تابعی از بار و پارامترهای منبع تغذیه برنامه ریزی کرد تا عملکرد PWM بهینه سازی بهینه سازی شود. انجام چنین اقداماتی منجر به کاهش چشمگیر تلفات کلیدزنی در سیستم می شود. ارزیابی عمیق این روش کنترلی را می توان در مراجع بالایی پیدا کرد. باید یادآوری کرد که نویسندگان کنترل جریان هیسترزیس انطباقی را برای کنترل ریپل های جریان در ماشین های مغناطیسی دائمی درونی (IPM) و راه اندازهای موتور سنکرون معرفی کرده بودند. در این مقاله، این روش در فیلتر فعال موازی سه فاز چهار-¬سیم بکارگرفته شده است. کارهای تحقیقاتی [8 و 9] از کنترلر توسعه یافته برای فیلتر قدرت فعال موازی (SAPF) گزارش می دهند که برای مدل های خطی سازی شده مناسب است. با این وجود، در اینجا، این روش بطور کامل برای هر دو کنترلر PI و فازی ارائه شده است که نتایج قابل قبولی برای طیف وسیعی از شرایط کاری فراهم می سازد. علاوه بر آن، از APF در دنبال کردن مرجع دقیق جریان و کار کردن با باند بسامدی مدوله کردن قابل تنظیم می توان استفاده کرد. بنابراین با پیاده سازی چنین روشی، APF می تواند بطور عالی هارمونیک را جبرانسازی کند. برای تایید روش ارائه شده، اعتبار سنجی بلادرنگ با استفاده از شبیه ساز دیجیتال بلادرنگ (RTDS) انجام شده است. نتایج نشان می دهد که روش فازی بکار گرفته شده از نظر نرخ همگرایی و جبرانسازی هارمونیک نسبت به روش مرسوم برتری عملی دارد.
ادامه این مقاله بدین شکل آرایش یافته است: توپولوژی فیلتر فعال و استراتژی کنترل بطور خلاصه در قسمت 2 توصیف شده است. روش هیسترزیس انطباقی در بخش 3 ارائه شده است. عملکرد روش هیسترزیس انطباقی با استفاده از کنترلر PI در بخش 4 و کنترلر هیسترزیس فازی انطباقی بکارگرفته شده در بخش 5 بحث شده است. RTDSها در بخش 6 توضیح داده شده اند. نهایتا نتیجه گیری در بخش 7 آورده شده است.
2. ساختار سیستم
2.1 توصیف سیستم قدرت
توپولوژی مبدل بصورت یک فیلتر فعال برای یک ایزوله کننده هارمونیک در شبکه قدرت ارائه شده است و ترتیب آن در شکل 1 نمایش داده شده است. این سیستم با یک منبع 50 هرتز دارای یک سیستم سه فاز چهار سیم پیکربندی شده است. APF بصورت موازی در نقطه مشترک کوپل شدگی (PCC) به سیستم متصل شده است. بنابراین به عنوان یک منبع ولتاژ عمل کرده و قادر به مسدود سازی جریان هارمونیک منتشر شده از بازهای غیرخطی است. ساختار پیشنهاد شده منطبق بر یک استراتژی id-iq است. این موضوع بطور خلاصه در زیربخش ها نشان داده شده است.
به منظور جبرانسازی موثر، طراحی APF یک معیار مهم است. بطور خلاصه، به منظور جبرانسازی کامل، کنترلر باید قادر به برآورده کردن این ضروریات باشد: (الف) استخراج و تزریق جریان های هارمونیکی، (ب) حفظ ولتاژ لینک DC ثابت، (پ) خودداری از جذب یا تولید توان راکتیو با مولفه های بسامد اصلی. در اینجا، الگوریتم کنترل فیلتر فعال به منظور جبرانسازی هر دو هارمونیک و توان راکتیو جذب شده توسط بار آلوده شده اجرا می شود. علاوه بر آن، برای دستیابی به جریان های جبرانساز، رفتار فیلتر تحلیل شده است. تحلیل قدرت را می توان با در نظر گرفتن مبدل به عنوان یک منبع ولتاژ سینوسی بصورت موازی با باز آلوده شده انجام داد. در واقع، این منبع ولتاژ نمی تواند توان اکتیو مورد نیاز را به مدت طولانی فراهم کند؛ این موضوع برای تحلیل کنترل مد نظر قرار داده شده است.
2.2 استخراج جریان هارمونیک با استفاده از استراتژی id-iq
در این مقاله از استراتژی id-iq به منظور جبرانسازی کامل استفاده شده است [10]. این استراتژی در شکل 2الف نمایش داده شده است.
در این روش، جریان های مرجع از طریق جریان های لحظه ای فعال و غیرفعال id و iq بار غیرخطی بدست می آیند. جریان dq بار را می توان از رابطه (5) بدست آورد. تبدیل دو مرحله ای رابطه ای میان قالب های مرجع ثابت و گردان بدست می دهد. شکل 2ب بردارهای ولتاژ و جریان در قالب های مرجع ثابت و گردان را نمایش می دهد. زاویه تبدیل نسبت به تمام هارمونیک های ولتاژ و ولتاژهای نامتعادل حساس است؛ در نتیجه می تواند ثابت نباشد. روابط ریاضی آن در رابطه (10) و (6) آورده شده است؛ نهایتا جریان های مرجع از رابطه (7) بدست می آیند. یکی از اصلی ترین مزیت های این روش زاویه است که از روی ولتاژ اصلی مستقیما محاسبه می شود.
این موضوع به سیستم امکان نابستگی به بسامد با اجتناب از حلقه قفل شونده فاز (PLL) در مدار کنترلی را می دهد که در نتیجه آن، مشکلات سنکرون سازی با شرایط نامتعادل و از حالت اصلی خارج شده ولتاژ اصلی نیز از دور خارج می شوند. بنابراین id-iq به حد بسامد کاری وسیع عمدتا توسط بسامد قطع منبع ولتاژ اینورتر (VSI) دست پیدا می کند. طبق دیاگرام کنترل فیلتر فعال موازی، جریان های id و iq طبق تبدیل Park بدست آمده و سپس با عبور دادن از فیلتر بالاگذر، مولفه های DC در جریان های بار غیرخطی حذف می شوند. فیلترهای استفاده شده در مدار از نوع باترورث بوده و برای کاهش اثر فیلتر بالاگذر بکار رفته اند. می توان از یک فیلتر بالاگذر جایگزین (AHPF) در مدار استفاده کرد که می توان از طریق یک فیلتر پایین¬گذر (LPF) هم مرتبه و هم بسامد قطع بدست آورده شود. می توان آن را به راحتی با استفاده از تفاضل سیگنال ورودی و خروجی و نمونه فیلتر شده بدست آورد. فیلتر باترورث استفاده شده در مدار تزریق هارمونیک دارای بسامد قطع برابر با نصف بسامد اصلی ( fc ¼ f/2) است، که در نتیجه آن می توان یک جابجایی فاز اندک در هارمونیک ها و پاسخ بقدر کافی سریع گذرا بدست آورد.
Abstract
Optimising the performance of power system networks using conventional methods is quite difficult because of the complex nature of systems that are highly non-linear and non-stationary. In this study a hybrid adaptive fuzzy hysteresis current controller for shunt active power filter (SAPF) is proposed. The conventional adaptive hysteresis concept is hybridised with fuzzy logic controller (FLC), which facilitates discarding of uncertainty in the system. In fact, conventional proportionalintegral (PI) controllers for shunt active filter are based on a linearised model that fails to react under transient events. On the other side, FLC has widened its applicability to many engineering fields and offers satisfactory results for a wide variety of operating conditions. It helps in fulfilling the need for perfection, such as stability and robustness for every system. All this motivated to adopt FLC for SAPF applications. By incorporating an adaptive fuzzy hysteresis band, active power filter (APF) gains outstanding compensation ability under steady-state and transient conditions. To validate the proposed approach, the system is implemented on a real-time digital simulator and adequate results are reported for its verification.
1 Introduction
Electrical power is perhaps the most essential raw material used by commerce and industry today. It is an unusual commodity because it is required as a continuous flow. From the consumers’ point of view continuity of supply is an important aspect but in the present day, owing to the presence of non-linear loads continuity seems to be distractive and it is all because of power quality problems. It is important to realise that the electrical load is not static. Differences in duty cycle of equipment and variations in working pattern contribute to a constantly changing load pattern. This results in generating harmonics. Today, harmonics is a buzz word heard from electrical utilities to customers. Although harmonic voltages and currents are, by themselves, imperceptible, the physical phenomena that accompany them are perceivable [1]. The adverse effects of harmonics in electrical power systems are very real and failures related to voltage and current harmonics very often occur without warning. To reduce this harmonic propagation, active and passive filters are introduced. However, passive filters have demerits like fixed compensation characteristics [2], parallel and series resonance with source voltage harmonics and filtering characteristics strongly affected by source impedance. In addition, they are also bulky in nature and they lose their effective performance with passage of time. Owing to these reasons active filters have been proposed as a solution to passive filter problems. Interesting features of active filters are that they are smaller in size and capable of attenuating the harmonic currents in power systems by injecting equal but opposite compensating currents [3 – 5]. In spite of these features, successful control of active filters requires an accurate current reference that results in exact compensation and it became our key objective to develop an appropriate controller for APF. However, this article deals completely with controller diagnosis. On the other hand, to achieve significant compensation with fast control action, hysteresis controllers are used. In fact, among the various PWM techniques, the hysteresis-band current control PWM method is popularly used because of its simplicity of implementation [6]. Besides fast response current loop and inherent-peak current limiting capability, the technique does not need any information about the system parameters. In spite of this merit, current control with fixed hysteresis band has the disadvantage that the PWM frequency varies within a band because peak-to-peak current ripple is required to control all points of the fundamental wave. Indeed, this results in increasing the switching losses in the system. To avoid these limitations an adaptive hysteresis controller is developed by the author [7]. An attractive feature of the technique is; that the band can be programmed as a function of the load and the supply parameters to optimise the PWM performance. Performing such actions results in a drastic reduction of switching loss in the system. An in-depth assessment of the control technique can be found in the above reference. It is noted that, the authors had introduced the adaptive hysteresis current control for controlling the current ripples in interior permanent magnet (IPM) machines and synchronous motor drives. In this article, this technique is adopted in three-phase four-wire shunt active filter. The research works [8, 9] suggest that the authors have developed a controller for shunt active power filter (SAPF), which is suitable for a linearised model. However, herein, the technique is well presented with both PI and fuzzy controllers, which give satisfactory results for a wide variety of operating conditions. By incorporating adaptive hysteresis with fuzzy controller, the APF gains additional capability to track the exact reference current and operate with adjustable modulating frequency band. Therefore by implementing such a technique, the APF provides excellent harmonic compensation. To verify the proposed approach, real-time verification has been performed with a real-time digital simulator (RTDS). The results demonstrate that the proposed fuzzy approach outperforms the conventional method in terms of convergence rate and harmonic compensation.
The rest of the paper is organised as follows: the active filter topology and control strategy are briefly described in Section 2. The adaptive hysteresis technique is demonstrated in Section 3. Performance of the adaptive hysteresis technique with the PI controller is discussed in Section 4 and the proposed adaptive fuzzy hysteresis controller is discussed in Section 5. RTDSs are demonstrated in Section 6. Finally, the conclusions are given in Section 7.
2 System configuration
2.1 Description of power system
The inverter topology is presented as an active filter for a harmonic isolator in the power network and the arrangement is shown in Fig. 1. The system is configured with a 50 Hz supply with a three-phase four-wire system. The APF is connected parallel to the system at the point of common coupling (PCC). Thus, it acts as a voltage source and is capable of blocking harmonic current that flows from the non-linear loads. The proposed structure is adopted with an id –iq strategy. This is demonstrated briefly in the subsequent sections.
To compensate effectively, the APF design is an important criterion. In brief, for perfect compensation, the controller must be capable of achieving the following requirements: (i) extract and inject load harmonic currents, (ii) maintain a constant DC-link voltage and (iii) avoid absorbing or generating reactive power with fundamental frequency components. Herein, the active filter control algorithm is implemented to compensate for both harmonics and reactive power absorbed by the contaminated load. Besides, to attain the compensation currents, filter behaviour is analysed. The power analysis can be done considering the inverter as a sinusoidal voltage source in parallel to the contaminated load. As a matter of fact, this voltage source cannot deliver active power in the long term; this issue has been taken into account for control analysis.
2.2 Harmonic current extraction with id–iq strategy
In this paper, id –iq strategy is followed for perfect compensation [10]. This strategy is demonstrated in Fig. 2a.
In this method reference currents are obtained through instantaneous active and reactive currents id and iq of the non-linear load. dq load current can be obtained from (5). Two-stage transformations yield a relation between the stationary and rotating reference frame. Fig. 2b shows the voltage and current vectors in stationary and rotating reference frames. The transformation angle u is sensitive to all voltage harmonics and unbalanced voltages; as a result du/dt may not be constant. Arithmetical relations are given in (10) and (6); finally reference currents are obtained from (7). One of the major advantages of this approach is angle u, which is calculated directly from the main voltage.
This enables the system to be frequency independent by avoiding the phase-locked loop (PLL) in the control circuit, consequently, synchronising problems with unbalanced and distorted conditions of main voltage are also evaded. Thus, id –iq achieves a large frequency operating limit essentially by the cut-off frequency of the voltage source inverter (VSI). From the control diagram of the shunt active filter, load currents id and iq are obtained from Park transformation, then they are allowed to pass through the high-pass filter to eliminate the DC components in the non-linear load currents. The filters used in the circuit are Butterworth type, to reduce the influence of a high-pass filter. An alternative high-pass filter (AHPF) can be used in the circuit, which can be obtained through the low-pass filter (LPF) of same order and cut-off frequency. This can be achieved simply from the difference of the input signal and filtered one. The Butterworth filter used in harmonic injecting circuit has a cut-off frequency equal to one-half of the main frequency ( fc ¼ f/2), with this, a small phase shift in harmonics and sufficiently high-transient response can be obtained.
خلاصه
1. معرفی
2. ساختار سیستم
2.1 توصیف سیستم قدرت
2.2 استخراج جریان هارمونیک با استفاده از استراتژی id-iq
3. کنترل جریان هیسترزیس انطباقی
4. تنظیم ولتاژ DC مرسوم با استفاده از کنترلر PI
5. تنظیم ولتاژ DC بکارگرفته شده با استفاده از کنترلر فازی
5.1 طراحی توابع عضویت منطق فازی
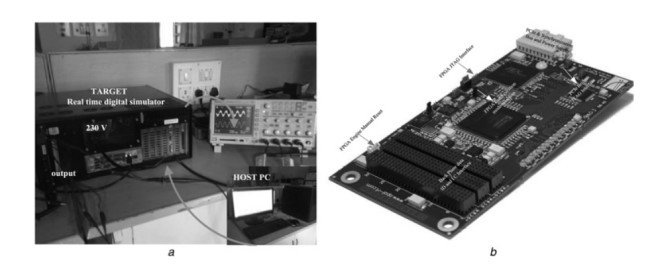
6. عملکرد سیستم با شبیه ساز دیجیتال بلادرنگ
6.1 شبیه ساز دیجیتال بلادرنگ
6.2 سخت افزار شبیه ساز
6.3 عملکرد سیستم با کنترلر PI
6.4 عملکرد سیستم با کنترلر فازی
7. نتیجه گیری و بحث
منابع
Abstract
1 Introduction
2 System configuration
2.1 Description of power system
2.2 Harmonic current extraction with id–iq strategy
3 Adaptive hysteresis current control
4 Conventional DC voltage regulation with PI controller
5 Proposed DC voltage regulation with fuzzy controller
5.1 Design of fuzzy logic membership functions
6 System performance with a real-time digital simulator
6.1 Real-time digital simulator
6.2 Simulator hardware
6.3 System performance with the PI controller
6.4 System performance with fuzzy controller
7 Conclusion and discussion
References