
دانلود رایگان مقاله وسیله نقلیه اتوماتیک زیر آب برای تحقیقات اقیانوس شناسی
چکیده
گلایدر آبی وسیله نقلیه اتوماتیک کوچک زیردریایی، برای حرکت از سطح اقیانوس به عمق آن و برگشت مجدد به سطح اقیانوس طراحی شده است در حالی که اندازه گیری دما، شوري، جریان متوسط عمق و مقادير ديگر در امتداد يک مسیر صیقل از طریق آب می باشد. کشیدن هیدرودینامیکی کم آنها و محدوده کنترل طیف گسترده ای به گلایدر در محدوده 0.2 تا 3 اجازه حرکت می دهد. آنها برای انجام ماموریت در دامنه مسافتی چندین هزار کیلومتر و در مدت چند ماه طراحی شده اند. گلایدر آبی از راه دور قابل کنترل و اندازه گیری های خود را در زمان مناسب از طریق تله متری بی سیم گزارش می کند. توسعه و عملیات گلایدر آبی و نتایج آزمایش های میدانی در Puget Sound گزارش شد.
1.مقدمه
سکوهای ابزارکوچک، هوشمند، و ارزان قیمت وعده توصیف اقیانوس داخلی با رزولوشن خیلی بالاتر در فضا و زمان نسبت به تکنیک ها وابسته به کشتی و مهارسازی احتمالی آن ارائه می دهند. شناورهای مستقل [1[شبکه توزیع شده برق را برای توصیف رواج با هزینه نسبتا کم نشان داده اند [2[. مدل های برجسته شناور های مذکور برای نظارت بر ساختار هیدروگرافی با مقیاس بزرگ داخلی اقیانوس در نظر گرفته اند [3.[ استومل [4] شبکه جهانی وسیله نقلیه ارزان گلایدر را فانتزی می کند که از انرژی حرارتی استخراج شده ازگرما شیب اقیانوس برق می گیرد و می تواند به ترانسکت های نمونه خاص هدایت شود. در اینجا ما وسیله نقلیه اتوماتیک زیردریایی (AUV) با برق باتری کار می کند را توصیف می کنیم که گلایدر آبی می نامیم و برای مشخصات تا حدود 1500 کیلومتر از اقیانوس بصورت عمودی و 6000 کیلومتر به صورت افقی تحت کنترل از راه دور بیش از چند ماه طراحی شده بود.
از لحاظ تاریخی، جرم فضا و زمان مشاهدات اقیانوس شناسی که توسط هزینه های کشتی های عملیاتی محدود شده است. بررسی های کشتی نباید بیشتر از یک ماه یا دو ماه با در نظر گرفتن استثنائات نادر طول بکشد (به عنوان مثال، آزمایشی شاتل هاوایی – تاهیتی [5])، اغلب به اندازه کافی تکرار نمی شود و به اندازه کافی برای حل اختلاف فزاینده غالب در زمان اقیانوس طولانی مدت نیست. مهارسازی تکنیک برتر را برای کشتی ثابت برای حل متغیر موقت، اما دوباره، با استثناهای کمیاب (TOGA-TAO [6] ) ارائه می دهد.آرایه های کنترل شده یا نظم کنترل شده برای حل متغیر مکان- زمان حاکم بر جریان های اقیانوسی بسیار پراکنده و کوتاه مدت هستند. البته، مهارسازی برای استقرار و بازیابی به کشتی ها تکیه می کنند و در مکان های ثابت منتخب محل ناو از قبل لنگر می اندازند. استومل [7] اعتقاد داشت که اقیانوس شناس ها با استفاده از شش وسیله نقلیه و کایت های دریایی، اقليم شناسی جوی را به روش مشابه ای تعین می کنند که ابزارهای های آسمان پژوهی برای انجام کلیه کارهای خود در شب های تاریک به آن متصل شده اند زمانی که آنها نتوانند ببینند چه اتفاقی در وسایل آنها رخ می دهد. در حالی که در نیمه آخر قرن ابزار اقیانوس به شدت پیشرفت کرده است ، در چند سال گذشته، اقیانوس شناس ها به شدت به هزینه های سکو های نسبتا کمی جهت بررسی داخل اقیانوس محدود شده بودند.
ما توسعه گلایدر اتوماتیک به عنوان ابزار گسترش فراوان چگالی مشاهدات هیدروگرافی در سفارشات هزینه کمتر قابل توجهی نسبت به احتمال کشتی ها و مهارسازی بررسی می کنیم. هزینه ساخت گلایدر معادل چند روز زمان ساخت کشتی و هزینه عملیاتی سالانه آن برابر کسری از یک روز عملیات ساخت کشتی است. گلایدر دریایی سازگار با محیط زیست قابل استفاده )غیر آلاینده(، می توانند در یک قایق کوچک مستقر، از راه دور کنترل شوند، و مدت کوتاهی پس از به دست آوردن اندازه گیری های خود، آن را گزارش کنند. آنها می توانند در مأموریت مشابهی به طور دائم در سفر در امتداد مسیر کنترل شده به شیوه بررسی کشتی و یا حفظ موقعیت جغرافیایی آن توسط پروفایل عمودی در برابر جریان های محیطی، نمونه برداری عملا به عنوان مهارسازی گلایدر واقعی انجام می شود. وسیله نقلیه ما در ابتدا به عنوان "Glider Mooring" شناخته، اما اکنون گلایدر آبی نامیده می شود به این دلیل که نام آن توصیفی تر از عملکردش است.
بخش دوم طراحی هیدرودینامیک، مکانیکی، الکتریکی، و نرم افزار گلایدر دریایی را نشان می دهد. بخش سوم عملکرد آن در آزمایشات میدانی در Puget Sound را شرح می دهد. این مقاله با بحث های مختصری در مورد استفاده بالقوه از گلایدر دریایی نتیجه گیری می کند.
بخش دوم: شرح وسیله نقلیه
الف) خلاصه اجزاء و عملیات
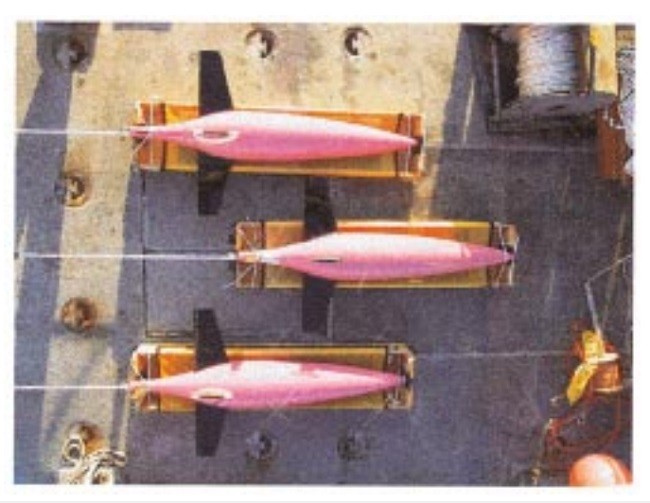
گلایدر دریایی شامل محفظه فشار محصور شده توسط فایبرگلاس نسبتا خوب می باشد که بال ها، استوانه ها و آنتن های آویزان رادیویی متصل شده اند (شکل 1). کاربرد انرژی، هزینه، قابلیت اطمینان و سهولت عملیات طراحی را هدایت می کند. دامنه وسیله نقلیه در ابعاد حوضه اقیانوس قابل مقایسه است، طراحی انرژی-کارآمد ضروری است. ما شکل وسیله نقلیه با کشش-پایین ترکیبی از چرخه فشار تقریبا متراکم در آب دریا را بصورت خنثی انتخاب کردیم که ترکیبی از آن منجر به پیکربندی نسبتا-خوب می شود.ارائه پیشرانه توسط کنترل شناوری، تحت تاثیر تنوع حجم جابجایی وسیله نقلیه قرار می گیرد. بال ها بصورت هیدرودینامیکی وسیله نقلیه را به جلو حرکت می دهد همانطور که وسیله نقلیه زیر آب یا روی آب می رود. در مقابل AUV به سمت جلو حرکت که مدت ماموریت و محدوده آنها در ساعت ها و ده ها کیلومتر ارزیابی می شود، وسیله نقلیه شناور-محرک می تواند به مدت بیش از یک سال و دامنه ها در مقایسه با پهنای حوضه اقیانوس صرفا در سفری آرام ماموریت انجام دهد. زیرا که مقیاس کشش تقریبا به اندازه سرعت وسیله نقلیه است، نصف سرعت چهار برابر مدت ماموریت و دو برابر دامنه وسیله نقلیه است. در مقایسه با گلایدر آیرودینامیکی (هواپیماهای دریایی)، گلایدرهای دریایی هر دو حرکت می کنند همانطورکه آنها حرکت و با تنظیم حجم آنها به صورت کوچکتر یا بزرگتر نسبت به مقدار مساوی آب دریا صعود می کنند. کنترل وضعیت با جابجایی جرم در وسیله نقلیه انجام شده است، نیاز به سطوح کنترل خارجی فعال و پیچیدگی ذاتی آنها از بین می رود.
برای حفظ هزینه کم، به راه اندازی و بازیابی قایق های کوچک آن اجازه می دهد، اندازه وسیله نقلیه به اندازه کافی برای حمل اجزای تشکیل دهنده انتخاب شد، یعنی کنترل شناور سیستم با یک پمپ فشار بالا و باتری ها متمرکز و الکترونیک برای وسیله نقلیه اجرای می شود. گلایدر آبی نسبتا خوب، دارای طول 1.8 متر ، بال بالغ بر 1 متر و استوانه آن 1.4 متر، وزن وسایل نقلیه 52 کیلوگرم می باشد، بنابراین آنها به راحتی با دو نفر قابل حمل هستند.
گلایدر آبی به طور متناوب حرکت و با دستور تا عمق بالا می روند، در مسیر دندانه دندانه در سرتاسر اقیانوس اجرای می شود. در سطح دریا وسیله نقلیه در حدود 45 اینچ به سمت پایین حرکت و در مجاور آنتن ها قرار می گیرد، سیستم موقعیت یابی جهانی (GPS) تثبیت محل ناو را دریافت، و برای ارسال داده های اندازه گیری و دریافت سایر دستورات ثابت می شود. وسیله نقلیه برای رسیدن به هدف، شیب حرکت و دنده بر اساس فاصله آن تا موقعیت هدف را انتخاب می کند. با انتخاب سرعت و جهت برخلاف میانگین فعلی بیش از عمق غواصی، می تواند به صورت عمودی در موقعیت جغرافیایی تثبیت محل ناو نمایش داده شود (مهارسازی واقعیت حالت). گلایدر آبی از تفاوت بین جابجایی های محاسبه شده و واقعی خود برای برآورد میانگین-عمق جریان استفاده می کند.
Abstract
Seagliders are small, reusable autonomous underwater vehicles designed to glide from the ocean surface to a programmed depth and back while measuring temperature, salinity, depth-averaged current, and other quantities along a sawtooth trajectory through the water. Their low hydrodynamic drag and wide pitch control range allows glide slopes in the range 0.2 to 3. They are designed for missions in range of several thousand kilometers and durations of many months. Seagliders are commanded remotely and report their measurements in near real time via wireless telemetry. The development and operation of Seagliders and the results of field trials in Puget Sound are reported.
I. INTRODUCTION
SMALL, smart, inexpensive instrument platforms offer the promise of describing the ocean interior with much higher resolution in space and time than is possible with techniques reliant on ships and moorings. Autonomous floats [1] have demonstrated the power of a distributed network to describe circulation at comparatively modest cost [2]. Profiling versions of these floats are poised to monitor the large-scale hydrographic structure of the ocean interior [3]. Stommel [4] fantasized a global network of inexpensive glider vehicles powered by thermal energy extracted from the ocean thermocline that could be directed to sample specific transects. Here we describe a battery-powered autonomous underwater vehicle (AUV) we call Seaglider designed to profile up to about 1500 km of the ocean vertically and 6000 km horizontally under remote control over many months.
Historically, the density in space and time of oceanographic observations has been limited by the cost of operating ships. Ship surveys tend to last no more than a month or two and, with rare exceptions (e.g., the Hawaii-Tahiti Shuttle Experiment [5]), are not repeated often enough and over a sufficiently long duration to resolve dominant space–time variability in the ocean. Moorings offer a superior technique to a stationary ship for resolving temporal variability, but again, with rare exceptions (e.g., the TOGA-TAO array [6]), moored arrays are too sparse and short-lived to resolve the dominant space–time variability of oceanic flows. Moorings, of course, rely on ships for deployment and recovery and are anchored at fixed locations chosen in advance. Stommel [7] remarked that determination of atmospheric climatology by means analogous to those used by oceanographers would be to use “half a dozen automobiles and kites to which air sounding instruments were attached and by doing all of their work on dark moonless nights when they couldn’t see what was happening in their medium.” While ocean instrumentation has progressed greatly in the last half century, until the last few years, oceanographers have been largely limited by cost to relatively few platforms from which to examine the ocean interior.
We view the development of an autonomous glider as a means of greatly extending the density of hydrographic observations at orders of magnitude lower cost than is possible with ships and moorings. The construction cost of a glider is equivalent to a few days of ship time and its annual operational cost is equivalent to a fraction of a ship day. Seagliders are reusable (nonpolluting), can be deployed from small boats, are controlled remotely, and report their measurements shortly after they are made. They can be used on the same mission to alternately travel along a commanded path in the manner of a ship survey or maintain their geographic position by profiling vertically against ambient currents, sampling virtually as a mooring does. Our vehicle was originally conceived as a “Virtual Mooring Glider,” but is now called Seaglider because the name is more descriptive of its operation.
Section II describes the hydrodynamic, mechanical, electrical, and software design of the Seaglider. Section III describes its performance in field trials in Puget Sound. The paper concludes with a brief discussion of potential uses of Seagliders.
II. VEHICLE DESCRIPTION
A. Component and Operation Summary
The Seaglider consists of a pressure hull enclosed by a fiberglass fairing to which wings, rudders, and a trailing antenna are attached (Fig. 1). Energy use, cost, reliability, and ease of operation guided the design. To achieve vehicle ranges comparable to ocean basin dimensions, an energy-efficient design was essential. We chose a low-drag vehicle shape combined with a pressure hull that is nearly neutrally compressible in seawater, the combination of which led to the fairing-hull configuration. Propulsion is provided by buoyancy control effected by variation of vehicle-displaced volume. Wings provide hydrodynamic lift to propel the vehicle forward as it sinks or rises. In contrast to propeller-driven AUVs whose mission durations and ranges are measured in hours and tens of kilometers, a buoyancy-driven vehicle can achieve mission durations of over a year and ranges comparable to ocean basin widths simply by traveling slowly. Because drag scales roughly as the square of vehicle speed, halving speed quadruples mission duration and doubles vehicle range. In contrast to aerodynamic gliders (sailplanes), Seagliders glide both as they dive and as they climb by adjusting their volume to be either slightly smaller or larger than that of an equal mass of seawater. Attitude control is accomplished by moving mass within the vehicle, obviating the need for active external control surfaces and their inherent complexity.
To keep the cost modest and allow it to be launched and recovered from small boats, vehicle size was chosen to be just big enough to carry the constituent parts, namely a buoyancy control system centered on a small high-pressure pump and the batteries and electronics to run the vehicle. The Seaglider fairing is 1.8 m long, its wings span 1 m, and the antenna mast is 1.4 m long. The vehicles weigh 52 kg so they are easily carried by two people.
Seaglider alternately dives and climbs to a commanded depth, executing a sawtooth path through the ocean. At the sea surface, the vehicle pitches downward by about 45 to expose its antennas, one to receive Global Positioning System (GPS) fixes and the other to transmit measurement data and receive commands. Based on its distance to a target position, the vehicle chooses a glide slope and bearing to approach the target. By choosing a speed and direction in opposition to current averaged over its dive depth, it can profile vertically at a fixed geographic position (the “virtual mooring” mode). Seaglider uses the difference between its dead-reckoned and actual displacements to estimate depth-averaged current.
چکیده
1.مقدمه
بخش دوم: شرح وسیله نقلیه
الف) خلاصه اجزاء و عملیات
ب) طراحی هیدرودینامیکی
ج) طراحی مکانیکی
چ) طراحی الکتریکی
ح) طراحی نرم افزار
III عملکرد میدان
الف) خلاصه ای از آزمایشات میدانی
ب) عملکرد هیدرودینامیک
ج) اندازه گیری های میدان
IV بحث
Abstract
I.Introduction
II.Vehicle Description
A. Component and Operation Summary
B. Hydrodynamic Design
C. Mechanical Design
D. Electrical Design
III.Field Performance
A. Summary of Field Tests
B. Hydrodynamic Performance
C. Field Measurements
IV.Discussion