
دانلود رایگان مقاله مکان یابی UHF RFID بر اساس ارزیابی سیگنال هایی از تگ Backscattered
چکیده
این مقاله یک سیستم سنجش موقعیت دو بعدی را برای تگهای شناسایی با استفاده از فرکانس رادیویی (RFID) با فرکانس فوق العاده بالای (UHF) منفعل بر اساس ارزیابی سیگنالهای ترانسپندر backscatter معرفی میکند. کاربرد اصلی سیستم در مکانیابی اشیای ثابتی است که با ترانسپندر RFID برچسب میخورند. با ترکیب ارزیابی فاز و دامنه، دقت و استواری تخمین موقعیت به طور قابل توجهی در مقایسه با هر دو روش به تنهایی، بهبود بخشیده میشود. از یک سیستم چند ورودی و چند خروجی برای تخمین موقعیت استفاده میکنیم، در این سیستم برخی از دستگاهها فرستنده هستند و باقی دستگاه گیرنده هستند. برای اثبات مفهوم؛ یک تشریح کننده سیستم سنجش موقعیت محلی شامل تگهای EPCglobal Class-1 Gen-2 UHF RFID منفعل معمولی، یک محصول عمومی آماده RFID خوان، هشت فرستنده و گیرنده در بخشی که با کاربر در ارتباط است، سخت افزار باند پایه، و پردازش سیگنال است. سنجش در یک محیط سربسته اداره با مساحت 3.5 m×2.5 m و که با دیوارها و سقف و کف بتنی محاط شده است، صورت میگیرد. نتایج آزمایشی مکانیابی دقیقی را با ریشه میانگین مربع خطا 0.020m و یک میانگین خطای 0.011 m نشان میدهد. برای تعیین حد سیستم، شبیه سازی دقیق اجرا میشود، که نتایج آزمایشی را تایید میکند.
1. مقدمه
در سالهای اخیر، شناسایی با استفاده از فرکانس رادیویی (RFID) به یک فناوری کلیدی در زمینه تدارکات و حمل و نقل تبدیل شد، این فناوری شناسایی و پیگیری اشیای که ترانسپندر RFID به آنها پیوست شده است را اجازه میدهد. تا زمانی که تگهای فعال، انرژی را از میدان الکترومغناطیسی ایجاد شده توسط RFID خوانها جمع آوری میکنند، میتوانند استفاده شوند، ترانسپندر به هیچ منبع برق محلی مانند باتری نیاز ندارد. این فناوری نیاز به نگهداری را کاهش میدهد در عین حال انعطاف پذیری بالا، طول عمر طولانی، هزینه پایین را به همراه دارد. اگر – علاوه بر شناسایی تگهای RFID و تشخیص حضور در منطقه بازجویی دستگاه Reader - بدست آوردن اطلاعات قابل اعتماد در مورد موقعیت دقیق ممکن شود، کاربردهای بالقوه به صورت قابل توجهی افزایش مییابند.
در این مقاله، یک سیستم سنجش دو بعدی را برای ترانسپندر RFID با فرکانس فوق العاده بالا (UHF) فعال براساس ارزیابی سیگنالهایی از تگهای backscatter را ارائه میدهیم. کاربرد اصلی این سیستم، مکانیابی اشیای ثابت با تگهای RFID است. یک مورد کاربرد بالقوه میتواند مکانیابی کتاب در کتابخوانه باشد. برای اثبات مفهوم، یک سیستم سنجش مختصات از تگ EPCglobal Class-1 Gen-2 UHF RFID معمولی، یک محصول آماده تجاری RFID خوان، هشت فرستنده و گیرنده در بخشهای مرتبط با کاربر، سخت افزار باند پایه، و پردازش سیگنال برای سنجش یک محیط داخلی محیط اداری استفاده شد. نتایج آزمایشی تایید میکنند که، از نظر دقت و استواری، رویکردهای مشهور فعلی براساس یا فاز یا ارزیابی دامنه بهتر از الگوریتمهای ارائه شده اجرا میشوند.
2. کارهای مربوطه
در مقابل رویکرد ما، سیستمهای متعددی نشان داده شدند که مکانیابی دستگاه موبایل مجهز به RFID خوان را فعال میکنند. اگر تگهای RFID مرجع بیشماری در محلهای شناخته شده و ثابت توزیع شوند، موقعیت دستگاه موبایل میتواند با موقعیت ترانسپندر در حال برقراری ارتباط با Reader تعیین شود [1]-[3]. با این رویکرد، اندازه منطقه سنجش و دقت سیستم به روشی که تگهای RFID توزیع میشوند، بستگی دارد.
چندین سیستم که مکانیابی تگهای RFID را اجازه میدهند در سالهای اخیر معرفی شدند. روشی که احتمالآ اغلب اوقات استفاده میشود تخمین موقعیت تگ با توجه به سطح انتقال یا قدرت سیگنال دریافت شده توسط گیرنده ثابت است[4]-[6]. برخی از سیستمهای مکانیابی برای ترانسپندر UHF RFID با اصل k-نزدیکترین همسایه ایجاد شدهاند، در این سیستمها شاخص قدرت سیگنال دریافتی (RSSI) از RFID در مقایسه با مقادیر RSSI تگهای مرجع بیشمار در موقعیتهای ثابت و شناخته شده سنجیده میشود، این سیستمها در [7] و [8] معرفی شدند. رویکرد دیگری وجود دارد که نیاز ندارد هیچ ترانسپندری به روابط بین قدرت سیگنال دریافتی و فاصله تگ از چندین RFID خوان ثابت تکیه کند [9][10]. یک مدل احتمالی برای پیگیری ترانسپندر در یک گیت RFID در [11] تشریح شده است، که در آن مدل مخفی مارکوف (HMM) برای پوشش ماهیت تصادفی رخدادهای خواندن و پویایی فرآیند شناسایی در گیت استفاده میشود. HMM بر اساس RSSI است، و با مجموعهای از مدلهای آموزش دیده مناسب، احتمال دارد که تعیین کند که آیا یک تگ ثابت است یا در حال عبور از گیت RFID است.
سیستمهای مختلف موقعیتیابی RFID به ارزیابی فاز سیگنال پاسخ تگ تکیه کردند. استفاده از چندین آرایه آنتن متعدد، به ترانسپندر RFID اجازه میدهد که براساس زاویه دریافت سیگنال پاسخ تگ یا توسط فرمان پرتو مکانیابی را انجام دهند [12]–[15]. از آنجایی که فاز دریافت (POA) پوشش داده نشده با طول مسیر انتشار متناسب است، مکانیابی ترانسپندر با ارزیابی POA فعال میشود. به هر حال، از آنجایی که ابهام 2π در سنجش فاز وجود دارد، سیستمها با فرکانس حامل ثابت برای بدست آوردن تخمین دقیق موقعیت به تعداد زیادی مسیر سیگنال متفاوت نیاز دارند [16], [17]. ابهام در سنجش فاز میتواند با استفاده از چندین فرکانس حامل متفاوت مدیریت شود، چرا که تحلیل تفاوت فازهای نتیجه شده به سنجش فاصله مطلق منجر میشود [18]–[21]. به هر حال، عملکرد این سیستمها به پهنای باند موجود بستگی دارد، که به شدت به استانداردهای نظارتی محدود شده است. چندین سیستم مکانیابی RFID با دیافراگم مصنوعی [22] یا دیافراگم مصنوعی معکوس [23]–[25] وجود دارند، که به حرکت آنتن Reader یا ترانسپندر RFID نیازمندند.
در [26]، سیستم سنجشی را ارائه دادیم، که تگهای RFID متعدد باید در یک آرایه خطی یکنواخت (ULA) مرتب شوند. با تحلیل فاز سیگنال ترانسپندر backscatter الگوریتم ارائه شده موقعیت ULA را همزمان با جهت گیری زوایه آن تخمین میزند. با استفاده از این رویکرد، ابهام در سنجش فاز میتواند با ارزیابی تفاوت فاز ایجاد شده با مجاورت ترانسپندرهای RFID ULA مدیریت شود. به هر حال، در بسیاری از موارد، تگها باید در فضای فشردهای جایگذاری شوند، که در این صورت نمیتوانند به دستگاههای موبایل اعمال شوند. علاوه بر این، تلاش محاسباتی روش پیشنهادی قابل توجه است.
در این مقاله، یک سیستم مکانیابی دو بعدی را برای ترانسپندر UHF RFID فعال بر اساس ارزیابی سیگنالهایی از تگهای backscatter ارائه میدهیم. در مقایسه با سیستم ULA با تگهای RFID، دقت مشابهی دارد، در عین حال تنها یک ترانسپندر واحد باید مکانیابی شود، که برای دستگاههای موبایل بسیار بیشتر قابل اجرا است. به این دلیل که الگوریتم رائه شده برای مکانیابی ترانسپندر RFID میتواند به ضرب ماتریسها کاهش یابد، بار محاسباتی به طور قابل توجهی پایینتر است. در مقابل سیستمهای رایج، که فاز یا دامنه سیگنالهای دریافتی را ارزیابی میکنند، ترکیب هر دو پارامترها مزایایی از هر دو رویکرد را ارائه میدهد، و به مکانیابی مقاوم و دقیق منجر میشود. علاوه بر این، الگوریتم ارائه شده به ترانسپندر مرجع که در موقعیتهای ثابت و شناخته شده توزیع شدهاند، تکیه نمیکند، و نیازمند حرکت انتن Reader یا تگ RFID برای تخمین موقعیت نیست.
3. شرح سیستم
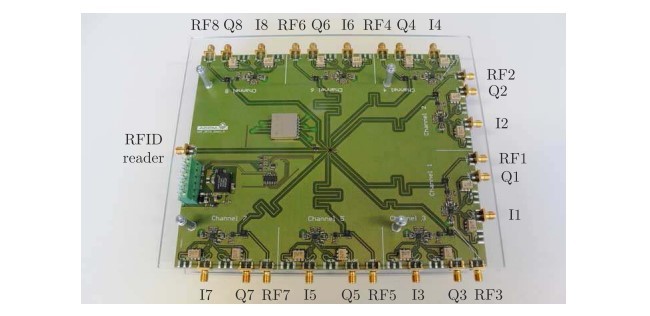
مفهوم پایه سیستم سنجش موقعیت برای ترانسپندر UHF RFID فعال به ترکیب ارزیابی فاز و دامنه سیگنالهای دریافت شده از تگ تکیه میکند. اگر یک دور بررسی انبار یا موجودی با یک RFID خوان با استفاده از K فرستنده و گیرنده از نشاندهنده سیستمهای چند ورودی چند خروجی (MIMO) آغاز شود، ترانسپندر اطلاعات خود را با استفاده از مدولاسیون backscatter منتقل میکند، که در این مورد ضریب انعکاس آنتن تگ بین دو مرحله هماهنگ با داده ارسال شده سوئیچ میشود. سیگنال تگ backscatter توسط K – 1 دستگاه باقی مانده دریافت میشود، با تقویت کننده کم نویز (LNA) تقویت میشود، به باند پایه تبدیل میشود، و با مبدل آنالوگ به دیجیتال ثبت میشود. این مسئله در M سیگنال فرکانس واسط پیچیده، برای هر ترکیب دریافت شده و آنتن انتقال دهنده، یک نتیجه را میدهد. هردو POA و دامنه این سیگنالها به موقعیت ترانسپندر RFID متکی است، مکانیابی میتواند بر اساس هر پارامتر به صورت مجزا بدست آید. به هر حال، دقت و مقاومت تخمین موقعیت به طور قابل توجهی بهبود بخشیده میشود.
Abstract
This paper introduces a 2-D position measurement system for passive ultra-high frequency (UHF) radio frequency identification (RFID) tags based on evaluation of backscattered transponder signals. The main application of the system is the localization of stationary objects tagged with RFID transponders. By combining phase and amplitude evaluation, the accuracy and the robustness of the position estimates are significantly improved compared with either approach alone. A multiple input multiple output system in which, sequentially, each frontend is configured to work as a transmitter while the remaining frontends serve as receivers is used to enable position estimation. For proof of concept, a local position measurement system demonstrator was built comprising conventional passive EPCglobal Class-1 Gen-2 UHF RFID tags, a commercial off-the-shelf RFID reader, eight transceiver frontends, baseband hardware, and signal processing. Measurements were carried out in an indoor office environment where the 3.5 m×2.5 m measurement zone was surrounded by drywalls and concrete floor and ceiling. The experimental results showed accurate localization with a root-mean-square error of 0.020 m and a median error of 0.011 m. To determine the limits of the system, accuracy simulations were performed, which confirm the experimental results.
I. INTRODUCTION
IN RECENT years, radio frequency identification (RFID) has become a key technology in the field of logistics, as it allows identification and tracking of the objects to which the RFID transponders are attached. Since passive tags, which collect the energy from the interrogating electromagnetic field created by RFID readers, can be used, the transponders require no local power source such as batteries. This results in reduced need for maintenance while achieving high flexibility, long lifetime, and low cost. Potential applications would be enhanced considerably if—in addition to identifying RFID tags and thus determining their presence in the interrogation zone of the reader—it were possible to gain reliable information about their accurate position.
In this paper, we present a 2-D position measurement system for passive ultra-high frequency (UHF) RFID transponders based on evaluation of backscattered tag signals. The main application of this system is the localization of stationary objects tagged with RFID labels. A potential use case could be the localization of books in a library. For proof of concept, a local position measurement system demonstrator comprising conventional EPCglobal Class-1 Gen-2 UHF RFID tags, a commercial off-the-shelf RFID reader, eight transceiver frontends, baseband hardware, and signal processing was used for measurements in an indoor office environment. The experimental results confirm that, in terms of accuracy and robustness, the currently popular approaches based on either phase or amplitude evaluation are outperformed by the presented algorithm.
II. RELATED WORK
In contrast to our approach, several systems have been presented which enable localization of mobile devices equipped with RFID readers. If numerous reference RFID tags are distributed at fixed and known locations, the position of the mobile device can be determined by the location of the transponders communicating with the reader [1]–[3]. With this approach, the size of the measurement zone and the system accuracy depend on the way the RFID tags are distributed.
Several systems that allow localization of RFID tags have been introduced in recent years. The method probably used most often derives the estimate of the tag position from the transmission level or the signal strength received by stationary receivers [4]–[6]. Localization systems for passive UHF RFID transponders that build on the k-nearest neighbor principle, where the received signal strength indicator (RSSI) at an RFID reader is compared with the RSSI values of numerous reference tags at fixed and known locations, were introduced in [7] and [8]. Other approaches that require no reference transponders rely on the relationship between received signal strength and distance of the tag from several stationary RFID readers [9], [10]. A probabilistic model for tracking transponders at an RFID gate was described in [11], where a hidden Markov model (HMM) is used to cover both the stochastic nature of read events and the dynamics of a typical identification process within the gate. The HMM is based on the RSSI, and with a set of appropriately trained models, it is possible to determine whether a tag is stationary or moving through the RFID gate.
Various RFID localization systems rely on phase evaluation of the tag response signal. Using multiple antenna arrays allows the RFID transponders to be localized based on the angle-of-arrival of the tag response signal or by beam steering [12]–[15]. Since the unwrapped phase-ofarrival (PoA) is proportional to the length of the propagation path, localization of the transponder is enabled by PoA evaluation. However, as there is a 2π ambiguity in phase measurement, systems using a constant carrier frequency require a large number of different signal paths to achieve robust and accurate position estimation [16], [17]. The ambiguity of phase measurement can be handled using several different carrier frequencies, since analysis of the resulting phase differences leads to absolute distance measurements [18]–[21]. However, the performance of these systems depends on the available bandwidth, which is highly constricted by regulatory standards. Several RFID localization systems rely on coherent superposition of phase values sampled by synthetic apertures [22] or inverse synthetic apertures [23]–[25], where movement of either the reader antenna or the RFID transponder is required.
In [26], we have presented a measurement system, where multiple RFID tags must be arranged to form a uniform linear array (ULA). By analyzing the phase of the backscattered transponder signals the presented algorithm estimates the position of the ULA simultaneous with its orientation in azimuth. Using this approach, the ambiguity of phase measurement can be handled by evaluating the phase differences caused by adjacent RFID transponders of the ULA. However, in many cases the required space-intensive tag arrangement cannot be applied to the mobile device. Furthermore, the computational effort of the proposed method is substantial.
In this paper, we present a 2-D localization system for passive UHF RFID transponders based on evaluation of backscattered tag signals. Compared with the system based on a ULA of RFID tags, a similar accuracy is achieved while only single transponders has to be localized, which is more applicable to mobile devices. Furthermore, the computational load is significantly lower since the presented algorithm for localizing the RFID transponders can basically be reduced to matrix multiplications. In contrast to common systems, where either the phase or the amplitude of the received signal is evaluated, combining both parameters offers the advantages of both approaches, leading to accurate and robust localization. Furthermore, the presented algorithm does not rely on reference transponders which are distributed at fixed and known positions, and requires no movement of the reader antenna or the RFID tag for position estimation.
III. SYSTEM DESCRIPTION
The basic concept of the position measurement system for passive UHF RFID transponders relies on a combination of phase and amplitude evaluation of the received tag signal. If an inventory round is initiated by an RFID reader using one of the K transceiver frontends of the multiple input multiple output (MIMO) system demonstrator, the transponder communicates its information by means of backscatter modulation, where the reflection coefficient of the tag antenna is switched between two stages in accordance with the data being sent. The backscattered tag signal is received by the remaining K − 1 frontends, amplified by low-noise amplifiers (LNAs), down-converted to baseband, and recorded by analog-to-digital converters. This results in M complex intermediate frequency signals, one for each combination of receiving and transmitting antenna. As both PoA and amplitude of these signals rely on the position of the RFID transponder, localization can be achieved based on each parameter separately. However, due to the combination of phase and amplitude evaluation, the accuracy and the robustness of the position estimates are significantly improved.
چکیده
1. مقدمه
2. کارهای مربوطه
3. شرح سیستم
4. دستگاه سنجش
5. مدل سیگنال
.Aفاز دریافت سیگنال ترانسپندر دریافت شده
.Bدامنه سیگنال ترانسپندر دریافت شده
6. روش مکانیابی
A. مکانیابی مبتنی بر زاویه دریافت
B. مکانیابی مبتنی بر دامنه
C. مکانیابی براساس سیگنالهای ترانسپندر دریافتی
7. نتایج شبیه سازی
8. نتایج سنجش
A. مکانیابی مبتنی بر فاز دریافت
B. مکانیابی مبتنی بر دامنه
C. مکانیابی بر اساس سیگنال ترانسپندر دریافتی
D. مقایسه روشهای مکانیابی
9. نتیجه گیری
منابع
Abstract
1. INTRODUCTION
2. RELATED WORK
3. SYSTEM DESCRIPTION
4. MEASUREMENT APPARATUS
5. SIGNAL MODEL
A. Phase-of-Arrival of the Received Transponder Signal
B. Amplitude of the Received Transponder Signal
6. LOCALIZATION METHOD
A. Phase-of-Arrival-Based Localization
B. Amplitude-Based Localization
C. Localization Based on Received Transponder Signals
7. SIMULATION RESULTS
8. MEASUREMENT RESULTS
A. Phase-of-Arrival-Based Localization
B. Amplitude-Based Localization
C. Localization Based on Received Transponder Signal
D. Comparison of Localization Methods
9. CONCLUSION
REFERENCES